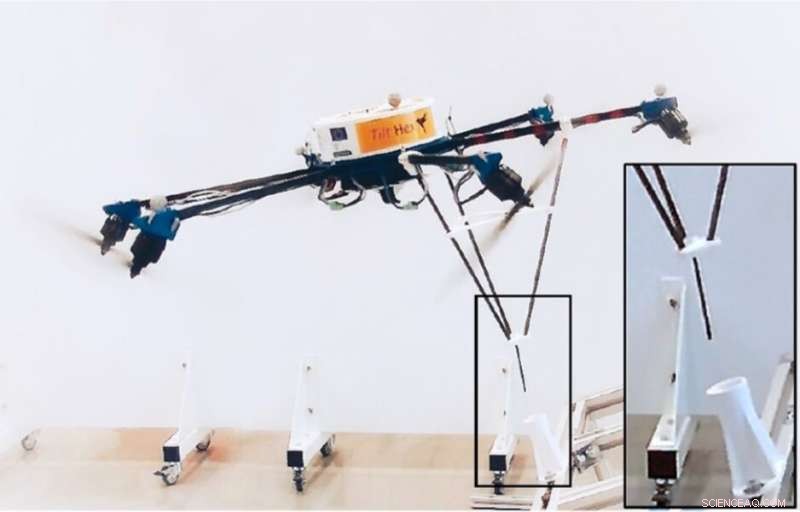
Tilt-Hex (NCFTP-flygplattform med tiltade propellrar utvecklad vid LAAS-CNRS) med den styvt fästa sluteffektorn. Notera hur interaktionen sker långt borta och utanför fordonets CoM. Kredit:Ryll et al.
På senare år har flygrobotar har blivit allt populärare, med potentiella tillämpningar inom en mängd olika områden. Många av dessa robotar är främst designade för att flyga runt och samla in visuell data från sin omgivning, men vissa kan också förstå, bära eller till och med sätta ihop föremål.
Att utrusta flygrobotar med avancerade fysiska interaktionsmöjligheter kan vara otroligt användbart, eftersom det skulle tillåta dem att utföra mer komplexa uppgifter. Dock, på grund av aerodynamikens komplexa natur, detta har ofta visat sig vara mycket utmanande, särskilt när ett fordon är nära ytor.
Forskare vid University of Cassino och södra Lazio, Université de Toulouse och University of Basilicata har nyligen introducerat ett nytt paradigm som möjliggör 6-D interaktionskontroll i flygrobotar. Deras tillvägagångssätt, beskrivs i en artikel publicerad i SAGE's International Journal of Robotics Research , skulle kunna bana väg mot utvecklingen av mer effektiva flygsystem som presterar bättre än befintliga robotar i flygmanipulation och fysiska interaktionsuppgifter.
Det nya paradigmet som föreslagits av forskarna, kallad 6-D flygande sluteffektor, kan appliceras på de flesta, om inte alla, helt aktiverade system som kan spåra en helpositionsbana med sluteffektorn. I studien, det applicerades specifikt på Tilt-Hex, en ny luftrobot, möjliggör oberoende kontroll av dess linjära och vinkelacceleration. Detta gjorde det slutligen möjligt för roboten att omedelbart motverka varje skiftnyckel som den stötte på när den interagerade med sin omgivning.
"Genom att utnyttja dess tiltade propelleraktivering, roboten kan kontrollera hela 6-D-positionen (position och orientering oberoende) och att utöva en full skiftnyckel (kraft och vridmoment oberoende) med en stelt fäst effektor, " förklarar forskarna i sin uppsats. "Interaktion uppnås med hjälp av ett tillträdeskontrollschema där en yttre slingkontroll styr det önskade tillträdesbeteendet (d.v.s. interaktionsefterlevnad/styvhet, dämpning, och massa) och en inre loop baserad på omvänd dynamik säkerställde full 6-D posespårning."
Det paradigm som utvecklats av forskarna uppskattar interaktionskrafter med hjälp av en tröghetsmätenhet (IMU)-förstärkt momentumbaserad observatör. När den integreras med kända robotalgoritmer kan den uppnå skiftnyckeluppskattning, samt rörelse- och interaktionskontroll. Intressant, detta "integrerade system" kräver ingen kraftsensor i sin grundkonfiguration och fungerar även med en minimal sensorsvit.
Forskarna har utvärderat effektiviteten av 6-D flygande sluteffektorparadigmet i en serie experiment, med fokus på fyra fallstudier:en hård touch och rutschkana på en träyta (d.v.s. glidytans uppgift), en lutad stift-i-hål-uppgift, ett tillträdesformande experiment, och en uppgift i närvaro av tidsvarierande interaktionskrafter. Dessa utvärderingar gav mycket lovande resultat, demonstrerar mångsidigheten och robustheten i tillvägagångssättet även i närvaro av miljöosäkerheter.
Dessutom, det nya paradigmet visade sig överträffa andra tekniker för flygmanipulation i sin förmåga, såväl som i dess tillförlitlighet, komplexitet och kostnader. Det skulle således kunna hjälpa utvecklingen av mer avancerade flygsystem som presterar bättre i manipulations- och fysiska interaktionsuppgifter.
"I framtiden, vi kommer att söka systemets fullständiga autonomi genom att ersätta motion capture-systemet med en fullständig inbyggd tillståndsuppskattning, " skriver forskarna i sin uppsats. "Dessutom, vi kommer att arbeta med differentieringskontaktkrafter på verktygsspetsen och störningar på plattformen (t.ex. vindbyar)."
© 2019 Science X Network