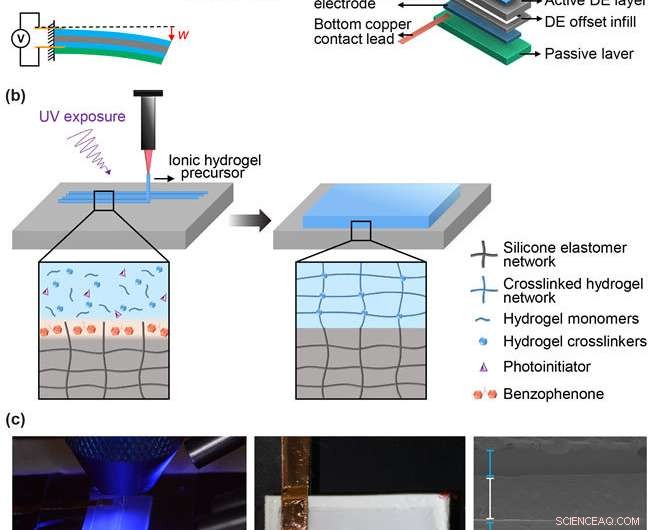
(a) Schematisk beskrivning av en mjuk manöveranordning (vänster) och sprängskiss av anordningen och ingående materiallager (höger). (b) Schematisk avsättning (3D-utskrift) av hydrogel på ytan av ett silikonskikt efter ytbehandling och under exponering för UV-ljus. (c) Tryck av den joniska hydrogelen på det passiva skiktet efter ytbehandling (vänster), slutlig 3D-utskriven DEA (mitten), och mikrostrukturbild av enhetens tvärsnitt (höger). Kredit:U.S. Army
För att övervinna materialstyvheten och aktiveringsbegränsningarna i nuvarande robotsystem, ett gemensamt forskningsprojekt från U.S. Army Research Laboratory och University of Minnesota sökte inspiration från ryggradslösa djur.
Den amerikanska armén använder robotar som är strukturellt stela, gör dem opraktiska när de utför militära operationer i mycket överbelastade och omtvistade stadsmiljöer, där hemlig manövrering är avgörande för att uppnå militär överlägsenhet.
"Framgångsrik smygmanövrering kräver hög strukturell flexibilitet och distributionskontroll för att smyga in i trånga eller begränsade utrymmen, arbeta under längre perioder och efterlikna biologiska morfologier och anpassningsförmåga, " sa Dr Ed Habtour, ARL-forskare som är specialiserad på olinjär strukturell dynamik.
Enligt Habtour, nuvarande militärrobotar har två stora begränsningar som hindrar dem från att efterlikna biologiska organismers förflyttning.
Först, dessa robotar saknar den nödvändiga dynamiska flexibiliteten, eftersom de mestadels är sammansatta med styva mekaniska och elektroniska komponenter.
Andra, styva robotar kräver komplexa mekanismer och elektriska kretsar för att uppnå aktiv aktivering och komplexa rörelsesätt.
För att övervinna dessa begränsningar, ett gemensamt ARL och UMN forskningsprojekt sökte inspiration från ryggradslösa djur.
Denna forskningsinsats ledde till skapandet av mjuka ställdonsprototyper med användning av aktiva material med anmärkningsvärt inställbara parametrar, såsom strukturell flexibilitet, morfologi och dynamisk aktivering.
Prototypen är det första helt 3D-tryckta dielektriska elastomer ställdonet, eller DEA, som kan utföra höga böjningsrörelser.
De 3-D-tryckta DEA uppvisade betydligt större avböjningar, tre gånger fler än andra nyare exempel i vetenskaplig litteratur.
Dessa resultat publicerades i Extreme Mekanik bokstäver (EML) i en tidning med titeln:"3D-tryckta elektriskt drivna mjuka ställdon", 2018.
"I den inledande fasen av projektet, vårt team började med att undersöka nya metoder för att emulera ryggradslösa djurs förflyttning, som gav grundläggande insikter i maskinerierna för deras mjukt distribuerade aktiveringskretsar som möjliggör höga böjningsrörelser utan stöd för skelett, " sa professor Michael McAlpine vid UMN.

Dr. Ed Habtour arbetar i US Army Research Laboratorys fordonsteknologidirektorat, där han är specialiserad på olinjära dynamiska system. Kredit:US Army-foto av Conrad Johnson
Att förstå de medfödda mekanismerna för den distributiva aktiveringen som observeras i naturen hjälpte teamet att identifiera de viktiga parametrarna som kan manipuleras för att utföra nya funktioner, som att uppnå mycket flexibla rörelsesätt.
Enligt McAlpine, att få vetenskapliga insikter om betydelsen av dessa parametrar, det var nödvändigt att först bygga och testa en prototyp som liknar ställdon som finns i naturen via en specialbyggd 3D-utskriftsplattform, och att sedan utveckla en enhetlig matematisk modell för att studera känsligheten för varje parameter och förutsäga de olika optimala aktiveringsmekanismerna.
UMN 3-D tryckta distribuerade aktiveringskretsar som involverar mjuka, töjbara material med mekaniska egenskaper som liknar biologiska organismer som bläckfisk och maskar.
ARL skapade en generaliserad modell med hjälp av en energisk formuleringsmetod, vilket var nyckeln för att identifiera två viktiga mekanismer för att möjliggöra hög böjningsrörelse i mjuka biologiska ställdon:(i) inställning av fysiska egenskaper (mekaniska och geometriska) genom att utnyttja samspelet mellan materialen och dynamiska olinjäriteter för att öka rörelsen; och (ii) att framhäva den elektromekaniska kopplingen mellan det elektriska fältet och den icke-linjära strukturella styvheten genom de fördelande aktiveringskretsarna.
"Forskningsresultaten representerar ett viktigt steg mot att ge Solider en autonom plattform för friformstillverkning - nästa generations 3D-skrivare, som kan skriva ut funktionella material och enheter - för att generera mjuka ställdon och potentiellt tjuderlösa mjuka robotar på begäran, i farten och när det behövs, " sa Habtour.
Habtour noterade att forskningen också tyder på att mjuka ställdon kan vara främsta kandidater för autonom tillverkning av additiv på slagfältet.
"Till skillnad från nuvarande 3-D-utskrivna DEA, den nya tillverkningsmetoden kräver inga efterbearbetningssteg, såsom montering, torkning eller glödgning, " sa huvudförfattaren Ghazaleh Haghiashtiani. "Med den nya 3D-utskriftsmetoden, Solider kan dra fördel av de unika aktiveringsegenskaperna hos mjuka DEA på grundmaterialnivå med mikroskalaupplösning och komplexitet, med minimal tidigare expertis."
När det gäller nästa steg, Habtour sa att avsikten är att utveckla de experimentella och teoretiska principerna som styr samspelet mellan interna gränssnitt och kinetik för interaktioner i tidsvarierande system som observerats i biologiska organismer, som säkerställer deras flexibla rörelse och motståndskraft.
"De spännande interaktionerna mellan materialens mikromekaniska egenskaper och olika olinjäriteter kan ge nya vetenskapliga möjligheter att efterlikna de symbiotiska interaktionerna i biologiska system, " sa Habtour. "Om vi kan förstå dessa interaktioner, sedan kan vi använda dessa insikter för att tillverka dynamiska strukturer och flexibla robotar som är designade för att vara självmedvetna, självkännande och kapabla att justera sina morfologier och egenskaper i realtid för att anpassa sig till en myriad av yttre och inre förhållanden."
Med detta, Habtour sa att implikationerna kommer att vara att upptäcka framväxande dynamik hos levande strukturer och efterlikna dem, tillverka funktionellt komplexa strukturer och enheter autonomt, och utnyttja nya manöversätt som inte är möjliga i konventionella robotsystem och mekaniska system.