Kredit:CC0 Public Domain
Transportens framtid i vattenvägarrika städer som Amsterdam, Bangkok, och Venedig – där kanaler löper längs med och under livliga gator och broar – kan inkludera autonoma båtar som färja varor och människor, hjälper till att rensa trängseln.
Forskare från MIT:s datavetenskap och artificiell intelligens Laboratory (CSAIL) och Senseable City Lab vid Institutionen för urbana studier och planering (DUSP), har tagit ett steg mot den framtiden genom att designa en flotta av autonoma båtar som erbjuder hög manövrerbarhet och exakt kontroll. Båtarna kan också snabbt 3D-skrivas ut med en billig skrivare, göra masstillverkning mer genomförbar.
Båtarna kunde användas för att taxi runt folk och för att leverera varor, underlätta gatutrafiken. I framtiden, forskarna föreställer sig också att de förarlösa båtarna anpassas för att utföra stadstjänster över natten, istället för under hektiska dagar, ytterligare minska trängseln på både vägar och kanaler.
"Föreställ dig att flytta en del av infrastrukturtjänsterna som vanligtvis sker under dagen på vägen - leveranser, sophantering, avfallshantering - till mitten av natten, på vattnet, använder en flotta av autonoma båtar, " säger CSAIL-chefen Daniela Rus, medförfattare på ett papper som beskriver tekniken som presenteras vid veckans IEEE International Conference on Robotics and Automation.
Dessutom, båtarna – rektangulära 4 x 2 meter stora skrov utrustade med sensorer, mikrokontroller, GPS -moduler, och annan hårdvara – kan programmeras för att självmontera till flytande broar, konsertscener, plattformar för livsmedelsmarknader, och andra strukturer inom några timmar. "På nytt, några av de aktiviteter som vanligtvis äger rum på land, och som orsakar störningar i hur staden rör sig, kan göras tillfälligt på vattnet, säger Rus, som är Andrew och Erna Viterbi professor i elektroteknik och datavetenskap.
Båtarna skulle också kunna utrustas med miljösensorer för att övervaka en stads vatten och få insikt i stads- och människors hälsa.
Medförfattare på tidningen är:första författare Wei Wang, en gemensam postdoc i CSAIL och Senseable City Lab; Luis A. Mateos och Shinkyu Park, båda DUSP postdocs; Pietro Leoni, en forskare, och Fábio Duarte, en forskare, både i DUSP och Senseable City Lab; Banti Gheneti, en doktorand vid Institutionen för elektroteknik och datavetenskap; och Carlo Ratti, en huvudutredare och professor i praktiken i DUSP och chef för MIT Senseable City Lab.
Bättre design och kontroll
Arbetet utfördes som en del av projektet "Roboat", ett samarbete mellan MIT Senseable City Lab och Amsterdam Institute for Advanced Metropolitan Solutions (AMS). 2016, som en del av projektet, forskarna testade en prototyp som kryssade runt stadens kanaler, går vidare, bakåt, och i sidled längs en förprogrammerad bana.
ICRA -papperet beskriver flera viktiga nya innovationer:en snabb tillverkningsteknik, en mer effektiv och smidig design, och avancerade spårningsalgoritmer som förbättrar kontrollen, precisionsdockning och låsning, och andra uppgifter.
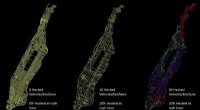
För att göra båtarna, forskarna 3D-tryckt ett rektangulärt skrov med en kommersiell skrivare, producerar 16 separata sektioner som skarvas ihop. Utskriften tog cirka 60 timmar. Det färdiga skrovet förseglades sedan genom att fästa flera lager glasfiber.
Integrerad på skrovet finns en strömförsörjning, Wi-Fi antenn, GPS, och en minidator och mikrokontroller. För exakt positionering, forskarna införlivade ett inomhus ultraljudsbaken system och utomhus i realtid kinematiska GPS-moduler, som tillåter lokalisering på centimeternivå, samt en IMU-modul (Inertial Measurement Unit) som övervakar båtens gir och vinkelhastighet, bland andra mätvärden.
Båten har en rektangulär form, istället för de traditionella kajak- eller katamaranformerna, att låta fartyget röra sig i sidled och att fästa sig vid andra båtar när man monterar andra strukturer. Ett annat enkelt men ändå effektivt designelement var propellerplacering. Fyra propeller är placerade i mitten av varje sida, istället för vid de fyra hörnen, genererar krafter framåt och bakåt. Detta gör båten mer smidig och effektiv, säger forskarna.
Teamet utvecklade också en metod som gör att båten kan spåra sin position och orientering snabbare och mer exakt. Att göra så, de utvecklade en effektiv version av en icke-linjär modell för prediktiv kontroll (NMPC) algoritm, vanligtvis används för att styra och navigera robotar inom olika begränsningar.
NMPC och liknande algoritmer har använts för att styra autonoma båtar tidigare. Men vanligtvis testas dessa algoritmer endast i simulering eller tar inte hänsyn till dynamiken i båten. Forskarna införde istället i algoritmen förenklade olinjära matematiska modeller som står för några kända parametrar, såsom drag av båten, centrifugal- och corioliskrafter, och tillsatt massa på grund av acceleration eller retardation i vatten. Forskarna använde också en identifieringsalgoritm som sedan identifierar eventuella okända parametrar när båten tränas på en väg.
Till sist, forskarna använde en effektiv plattform för prediktiv kontroll för att köra sin algoritm, som snabbt kan bestämma kommande åtgärder och ökar algoritmens hastighet med två storleksordningar över liknande system. Medan andra algoritmer körs på cirka 100 millisekunder, forskarnas algoritm tar mindre än 1 millisekund.
Testar vattnet
För att visa kontrollalgoritmens effektivitet, forskarna placerade ut en mindre prototyp av båten längs förplanerade stigar i en simbassäng och i Charles River. Under 10 testkörningar, forskarna observerade genomsnittliga spårningsfel - i positionering och orientering - mindre än spårningsfel för traditionella kontrollalgoritmer.
Den noggrannheten är tack, till viss del, till båtens inbyggda GPS- och IMU -moduler, som bestämmer position och riktning, respektive, ner till centimetern. NMPC -algoritmen krossar data från dessa moduler och väger olika mätvärden för att styra båten. Algoritmen är implementerad i en styrdator och reglerar varje thruster individuellt, uppdateras var 0,2 sekund.
"Styrenheten beaktar båtens dynamik, nuvarande tillstånd för båten, dragkraftsbegränsningar, och referensposition för de kommande flera sekunderna, för att optimera hur båten kör på stigen, ", säger Wang. "Vi kan då hitta optimal kraft för propellerna som kan ta båten tillbaka till banan och minimera fel."
Innovationerna inom design och tillverkning, samt snabbare och mer exakta kontrollalgoritmer, pekar på möjliga förarlösa båtar som används för transport, dockning, och självmontering till plattformar, säger forskarna.
Ett nästa steg för arbetet är att utveckla adaptiva kontroller för att ta hänsyn till förändringar i båtens massa och drag vid transport av människor och gods. Forskarna förfinar också styrenheten för att ta hänsyn till vågstörningar och starkare strömmar.
"Vi fann faktiskt att Charles River har mycket mer ström än i kanalerna i Amsterdam, "Säger Wang." Men det kommer att vara många båtar som rör sig, och stora båtar kommer att ge stora strömmar, så vi måste fortfarande överväga detta."