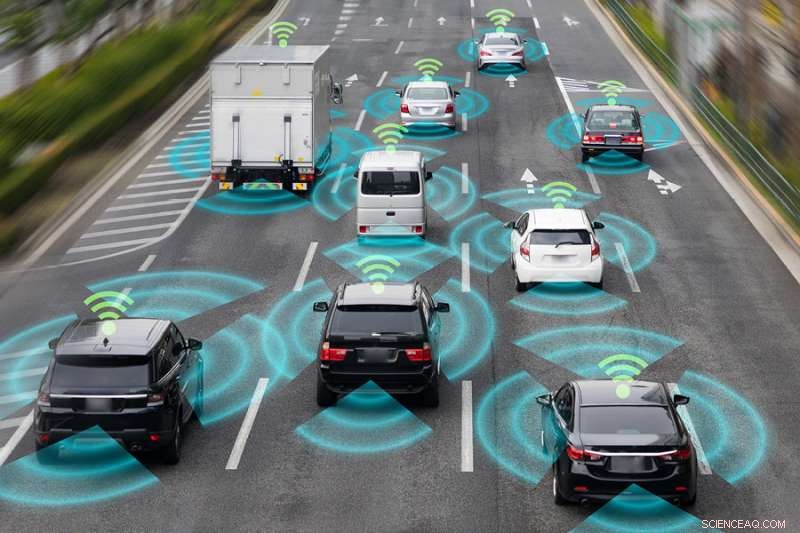
Argonne-forskare modellerar och simulerar hur uppkopplade och autonoma fordon kan påverka energi och mobilitet i storstadsområden. Kredit:Shutterstock / metamorworks
Utan tvekan kommer uppkomsten av uppkopplade och autonoma fordon (CAV) att ha nya och spännande effekter på mönster och transportsätt, men när det gäller att mäta dessa effekter, framtiden blir lite grumligare.
Hur kan dessa tekniker påverka hur människor reser och hur energi kommer att användas? Kommer de att få människor att spendera mer tid på vägen eller mindre? Hur kommer de att förändra hur vi förbrukar bränsle, tiden vi tillbringar på vägen, eller mängden trafik på våra vägar?
För att svara på sådana frågor, och förstå framtida mobilitet, forskare vid U.S. Department of Energys (DOE) Argonne National Laboratory använder avancerade modellerings- och simuleringsverktyg. Och i ett treårigt samarbetsprojekt, stöds av DOE:s SMART (Systems and Modeling for Accelerated Research in Transportation) Mobility Consortium, Argonne-forskare använder dessa verktyg för att förutsäga effekten av CAV på energi och rörlighet i storstadsområden.
"Vårt mål är att få en förståelse på systemnivå för hur transporter förändras, inklusive hur olika transportsätt samverkar, de beslut som fattas av resenärer som ligger till grund för dessa interaktioner, och hur automatisering påverkar allt, " sa Argonne Computational Transportation Engineer Joshua Auld. "Denna nivå av förståelse kommer att ge insikter för att hjälpa städer att bättre planera och anpassa sig till framtida transportförändringar."
Argonnes arbete främjar SMART-konsortiets uppdrag att öka vår förståelse för de effekter som kommer att uppstå från framtida mobilitetssystem. Projektsamarbetspartner inkluderar University of Illinois i Chicago, University of New South Wales, Texas A&M University, University of Michigan, Carnegie Mellon University, University of Washington, George Mason University, samt flera städer och planeringsbyråer.
Modellering och simulering
Nu två år in i deras projekt, Auld och andra medarbetare har utvecklat en modell för att representera införandet av delvis och helt automatiserade CAV på olika nivåer av marknadspenetration, använda förutsägelser baserade på kostnad och en individs betalningsvilja. Forskare har integrerat denna modell, tillsammans med en trafikflödesmodell för CAV, till plattformen Planning and Operations Language for Agent-based Regional Integrated Simulation (POLARIS), Argonnes transportsystemsimulator.
POLARIS simulerar mobilitet och trafikflöde genom att förutsäga det individuella beteendet hos "agenter, "som kan representera människor, hushåll och organisationer. Den analyserar hur miljontals av dessa agenter interagerar och fattar beslut om användningen av bilar, cyklar, genomresa, etc. I sin tur, dessa beslut påverkar transportsystemet som helhet. Forskare använde POLARIS för att simulera påverkan på rörlighet och reseflöde av dessa olika scenarier.
För att komplettera deras POLARIS-analyser och mäta energieffekter, forskare använde Argonnes verktyg Autonomie. Autonomie är det branschledande verktyget för att förutsäga bränsleförbrukningen från nuvarande och framtida fordon. För deras analys, forskare förlitade sig på Autonomie för att mäta effekten av CAV på energianvändning.
Kvantifiera energi- och mobilitetseffekter
För att kvantifiera mobilitets- och energieffekterna av att använda CAV, forskare tog hänsyn till ett antal inbördes relaterade mått. Bland dem är förändringar i tillryggalagda fordonsmil (VMT), restidens värde (VOTT), mängd trängsel och energiförbrukning.
Restidens värde mäter den upplevda bördan av tid som spenderas på resor, antagandet är att, ju lägre restidsbördan, ju mer en individ är villig att resa på vägen.
"Vi tittade på VOTT som en kritisk faktor som påverkar både rörlighet och energi eftersom, inte längre behöva ta itu med bördan av körning, CAV-förare kan välja att spendera mer tid på vägen, att veta att de kan använda sin restid till att göra annat, produktiva aktiviteter, ", sa Argonne Vehicle and Mobility Simulation Manager Aymeric Rousseau. "Vi fokuserade på att förstå effekten av VOTT på mobilitet och energi för olika fordonsteknologier och konsumentbeteenden."
"Övergripande, vår forskning fann att personer med tillgång till delvis automatiserade CAV:er tenderar att ta längre resor, när restidens värde minskade, och föraren lindrades från fokus på körning. Vi såg också att trängseln ökade i vissa scenarier, " sa Auld. "Vi hittade också förändringar i bränsleanvändning, inklusive en ökning av bränsleanvändningen när penetrationen på CAV-marknaden ökade, med ökningen av VMT."
Framtida steg
För att förbättra deras förmåga att representera och analysera de komplexa interaktioner som påverkar transport och mobilitet, forskare arbetar för att förbättra POLARIS och Autonomie för att bättre ta hänsyn till val av CAV-teknik (som olika nivåer av automatisering) och deras inverkan på trafikflödet. De tittar också på ny mobilitetsteknik, såsom transportnätsföretag och bildelningstjänster.
"Våra modellerings- och simuleringsmetoder är avgörande för att förutse vår nations transport- och energibehov. Genom att fortsätta att förbättra dessa verktyg och tekniker, vi kommer att vara bättre rustade att leverera verktyg och lösningar som möter framtida behov, sa Rousseau.
Detta arbete sponsras av DOE Vehicle Technologies Office (VTO) under Systems and Modeling for Accelerated Research in Transportation (SMART) Mobility Laboratory Consortium, ett initiativ från programmet för energieffektiva mobilitetssystem (EEMS). David Andersson, en programledare för DOE Office of Energy Efficiency and Renewable Energy (EERE), spelat en viktig roll i upprättandet av projektkonceptet, påskynda implementeringen och ge löpande vägledning.