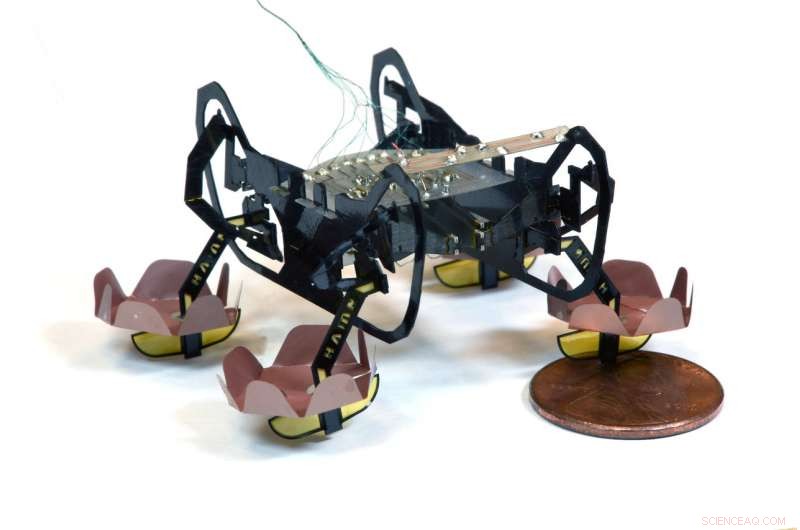
Nästa generation av Harvards Ambulatory Microrobot (HAMR) kan gå på land, simma på vattenytan, och gå under vattnet, öppna upp nya miljöer för den här lilla boten att utforska. Kredit:Yufeng Chen, Neel Doshi, och Benjamin Goldberg/Harvard University
I naturen, kackerlackor kan överleva under vattnet i upp till 30 minuter. Nu, en robotkackerlacka kan göra ännu bättre. Harvards ambulatoriska mikrorobot, känd som HAMR, kan gå på land, simma på vattenytan, och gå under vattnet så länge det behövs, öppna upp nya miljöer för den här lilla boten att utforska.
Denna nästa generations HAMR använder multifunktionella fotkuddar som förlitar sig på ytspänning och ytspänningsinducerad flytkraft när HAMR behöver simma men kan också lägga på en spänning för att bryta vattenytan när HAMR behöver sjunka. Denna process kallas elektrovätning, vilket är minskningen av kontaktvinkeln mellan ett material och vattenytan under en pålagd spänning. Denna förändring av kontaktvinkeln gör det lättare för föremål att bryta vattenytan.
Att röra sig på vattenytan gör att en mikrorobot kan undvika nedsänkta hinder och minskar motståndet. Med hjälp av fyra par asymmetriska klaffar och specialdesignade simgångar, HAMR robo-paddlar på vattenytan för att simma. Utnyttja den ostadiga interaktionen mellan robotens passiva klaffar och det omgivande vattnet, roboten genererar simgångar som liknar den hos en dykbagge. Detta gör att roboten effektivt kan simma framåt och vända.
"Denna forskning visar att mikrorobotik kan utnyttja småskalig fysik - i det här fallet ytspänning - för att utföra funktioner och förmågor som är utmanande för större robotar, sa Kevin Chen, en postdoktor vid Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) och första författare till artikeln.

HAMR:s multifunktionella trampdynor förlitar sig på ytspänning och ytspänningsinducerad flytkraft när HAMR behöver simma men kan också lägga på en spänning för att bryta vattenytan när HAMR behöver sjunka. Kredit:Yufeng Chen, Neel Doshi, och Benjamin Goldberg/Harvard University
Den senaste forskningen publiceras i tidskriften Naturkommunikation .
"HAMRs storlek är nyckeln till dess prestanda, sa Neel Doshi, doktorand vid SEAS och medförfattare till uppsatsen. "Om det vore mycket större, det skulle vara utmanande att stödja roboten med ytspänning och om den var mycket mindre, roboten kanske inte kan generera tillräckligt med kraft för att bryta den."
HAMR väger 1,65 gram (ungefär lika mycket som ett stort gem), kan bära 1,44 gram extra nyttolast utan att sjunka och kan paddla sina ben med en frekvens upp till 10 Hz. Den är belagd med Parylene för att förhindra att den kortsluts under vatten.
Väl under vattenytan, HAMR använder samma gång för att gå som den gör på torra land och är lika rörlig. Att återvända till torrt land står HAMR inför en enorm utmaning från vattnets lastrum. En vattenytspänningskraft som är två gånger robotens vikt trycker ner roboten, och dessutom orsakar det inducerade vridmomentet en dramatisk ökning av friktionen på robotens bakben. Forskarna styvade robotens transmission och installerade mjuka kuddar på robotens framben för att öka nyttolastkapaciteten och omfördela friktionen under klättring. Till sist, gå uppför en blygsam sluttning, roboten kan bryta sig ur vattnets lastrum.
"Denna robot illustrerar på ett bra sätt några av utmaningarna och möjligheterna med småskaliga robotar, " sa seniorförfattaren Robert Wood, Charles River professor i teknik och tillämpad vetenskap vid SEAS och kärnfakultetsmedlem i Harvard Wyss Institute for Biologically Inspired Engineering. "Att krympa ger möjligheter till ökad rörlighet - som att gå på vattenytan - men också utmaningar eftersom de krafter som vi tar för givna i större skala kan börja dominera i storleken av en insekt."
Nästa, forskarna hoppas kunna förbättra HAMRs förflyttning ytterligare och hitta ett sätt att återvända till land utan ramp, kanske med gecko-inspirerade lim eller impulsiva hoppmekanismer.