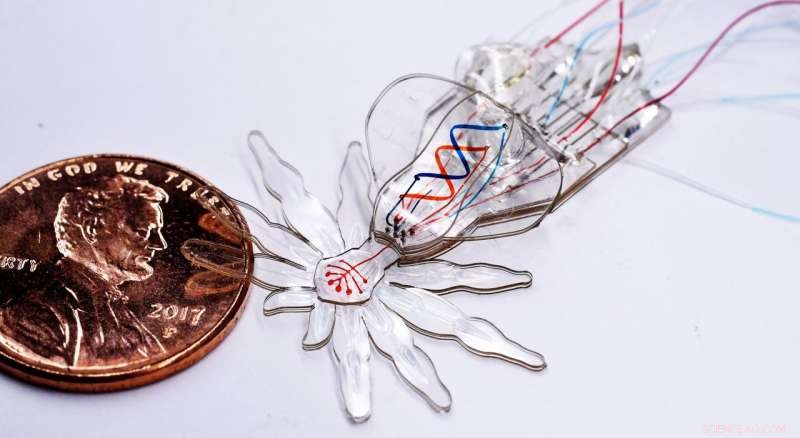
En ny tillverkningsprocess möjliggör skapandet av mjuka robotar i millimeterskalan med funktioner på mikrometerskalan som visas här med exemplet på en liten mjuk robotpåfågelspindel med rörliga kroppsdelar och färgade ögon och mage. Kredit:Wyss Institute vid Harvard University
Robotiker föreställer sig en framtid där mjuka, djurinspirerade robotar kan distribueras säkert i svåråtkomliga miljöer, som inuti människokroppen eller i utrymmen som är för farliga för människor att arbeta, där stela robotar för närvarande inte kan användas. Centimeterstora mjuka robotar har skapats, men hittills har det inte varit möjligt att tillverka multifunktionella flexibla robotar som kan röra sig och fungera i mindre skalor.
Ett team av forskare vid Harvards Wyss Institute for Biologically Inspired Engineering, Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), och Boston University har nu övervunnit denna utmaning genom att utveckla en integrerad tillverkningsprocess som möjliggör design av mjuka robotar på millimeterskalan med mikrometerskaliga funktioner. För att demonstrera förmågan hos deras nya teknik, de skapade en robotmjuk spindel-inspirerad av den millimeterstora färgglada australiska påfågelspindeln-av ett enda elastiskt material med kroppsformning, rörelse, och färgegenskaper. Studien publiceras i Avancerade material .
"De minsta mjuka robotsystemen tenderar fortfarande att vara väldigt enkla, med vanligtvis bara en grad av frihet, vilket innebär att de bara kan påverka en viss förändring i form eller typ av rörelse, " sa Sheila Russo, Ph.D., medförfattare till studien. Russo hjälpte till att initiera projektet som postdoktor i Robert Woods grupp vid Wyss Institute och SEAS och är nu biträdande professor vid Boston University. "Genom att utveckla en ny hybridteknologi som kombinerar tre olika tillverkningstekniker, vi skapade en mjuk robotspindel tillverkad endast av silikongummi med 18 frihetsgrader, som omfattar förändringar i struktur, rörelse, och färg, och med små funktioner i mikrometerområdet. "
Trä, Ph.D., är kärnfakultetsmedlem och medledare för Bioinspired Soft Robotics-plattformen vid Wyss Institute och Charles River professor i teknik och tillämpad vetenskap vid SEAS. "I riket av mjuka robotenheter, denna nya tillverkningsmetod kan bana väg för att uppnå liknande nivåer av komplexitet och funktionalitet i denna lilla skala som de som uppvisas av deras stela motsvarigheter. I framtiden, det kan också hjälpa oss att efterlikna och förstå struktur-funktion-relationer hos små djur mycket bättre än styva robotar kan, " han sa.
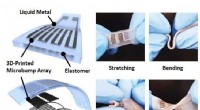
I deras Microfluidic Origami for Reconfigurable Pneumatic/Hydraulic (MORPH) enheter, teamet använde först en mjuk litografiteknik för att skapa 12 lager av en elastisk silikon som tillsammans utgör den mjuka spindelns materialbas. Varje lager skärs exakt ur en form med en laser-mikromaskineringsteknik, och sedan bunden till den nedan för att skapa den mjuka spindelns grova 3D-struktur.
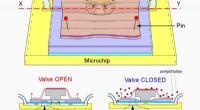
Nyckeln till att omvandla denna mellanstruktur till den slutliga designen är ett förutfattat nätverk av ihåliga mikrofluidkanaler som är integrerade i enskilda lager. Med en tredje teknik som kallas injektionsinducerad självfällning, trycksatt en uppsättning av dessa integrerade mikrofluidkanaler med ett härdbart harts från utsidan. Detta inducerar individuella lager, och med dem också deras grannlager, att lokalt böja sig in i sin slutliga konfiguration, som fixeras i rymden när hartset stelnar. Den här vägen, till exempel, den mjuka spindelns svullna buk och nedåtböjda ben blir permanenta drag.
"Vi kan exakt kontrollera denna origamiliknande vikningsprocess genom att variera tjockleken och den relativa konsistensen av silikonmaterialet intill kanalerna över olika lager eller genom att laserskära på olika avstånd från kanalerna. Under trycksättning, kanalerna fungerar då som ställdon som inducerar en permanent strukturell förändring, "sa den första och motsvarande författaren Tommaso Ranzani, Ph.D., som startade studien som postdoktor i Woods grupp och nu även är biträdande professor vid Boston University.
Den återstående uppsättningen av integrerade mikrofluidkanaler användes som ytterligare manöverdon för att färga ögonen och simulera bukens färgmönster hos påfågelspindelarterna genom strömmande färgade vätskor; och att framkalla gångliknande rörelser i benstrukturerna. "Detta första MORPH-system tillverkades i en enda, monolitisk process som kan utföras på några dagar och lätt itereras i designoptimeringsinsatser, sa Ranzani.
"MORPH-metoden kan öppna upp området för mjuk robotik för forskare som är mer fokuserade på medicinska tillämpningar där de mindre storlekarna och flexibiliteten hos dessa robotar kan möjliggöra ett helt nytt tillvägagångssätt för endoskopi och mikrokirurgi, " sa Wyss Institutes grundare Donald Ingber, M.D., Ph.D.