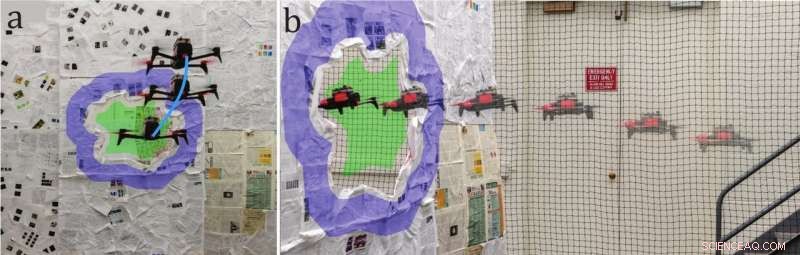
Olika delar av pipelinen:(a) Detektering av det okända gapet med hjälp av aktiv syn och TS2P-algoritm (cyanmarkering visar vägen som följs för att erhålla flera bilder för upptäckt), (b) Sekvens av kvadrotor som passerar genom det okända gapet med hjälp av visuell servobaserad kontroll. De blå och gröna markeringarna representerar de spårade förgrunds- respektive bakgrundsregionerna. Kredit:arXiv:1802.05330 [cs.RO]
Forskare har kommit fram till ett system som är bioinspirerat för att hjälpa drönare att passera genom små luckor. Forskarna testade sitt system och skrev en analys i en artikel som publiceras i IEEE Robotics &Automation Letters .
"GapFlyt:Active Vision Based Minimalist Structure-less Gap Detection For Quadrotor Flight" är av Nitin J. Sanket, Chahat Deep Singh, Kanishka Ganguly, Cornelia Fermüller och Yiannis Aloimonos. Författarna är från Perception and Robotics-gruppen vid University of Maryland i College Park.
De arbetade på en bioinspirerad design för quadrotors. Detta är ett ramverk avsett för quadrotors att flyga genom "okända luckor utan en 3D-rekonstruktion av scenen, " sa de, "med enbart en monokulär kamera och avkänning ombord."
Deras försök att notera att allt detta är utan en 3D-rekonstruktion tål en närmare titt. Någon annanstans, de förklarade att "Forskare och praktiker använder idag traditionella datorseendealgoritmer i syfte att bygga en representation av allmän tillämplighet:en 3D-rekonstruktion av scenen. Genom att använda denna representation, planeringsuppgifter är konstruerade och utförda för att tillåta kvadrotorn att visa autonomt beteende. Dessa metoder är ineffektiva eftersom de inte är uppgiftsstyrda."
Se bara på flygande insekter och fåglar – lösa problemet med navigering och komplex kontroll i evigheter på egen hand, utan att behöva bygga en 3D-karta, de sa, och är mycket uppgiftsdrivna.
Evan Ackerman in IEEE spektrum erbjöd trevligt en lektion i bin.
"Bina får det här att fungera genom en sorts minimalistisk brute-force-inställning till problemet:de flyger upp till ett litet hål eller gap, sväva, vandra lite fram och tillbaka för att samla in visuell information om var kanterna på springan, och sedan styra sig igenom. Det är inte snabbt, och det är inte speciellt elegant, men det är pålitligt och det tar inte mycket att utföra."
Titeln på deras papper speglar själva frågan de ställde som ett team:"Kan en quadrotor klara av att gå igenom ett godtyckligt format gap utan att bygga en explicit 3D-modell av en scen, använder bara en monokulär kamera?"
De satte den på prov i experiment med olika inställningar och fönsterformer. Det föreslagna ramverket testades på en modifierad hobbykvadrotor, Papegoja Bebop 2.
IEEE spektrum bar en bildtext som ytterligare beskrev vad de använde för experiment. Den modifierade drönaren, sa bildtexten, inkluderade en NVIDIA TX2-modul monterad på toppen. För avkänning, drönaren använde sin främre kamera och en nedåtvänd optisk flödessensor, som kombinerar en kamera plus ekolod.
Resultat? De sa att de uppnådde "en framgång på 85 % vid 2,5 m/s, även med en minsta tolerans på bara 5 cm."
IEEE spektrum noterade att de fick den framgångsfrekvensen över 150 försök "för olika godtyckligt formade fönster under ett brett spektrum av förhållanden som inkluderar ett fönster med en minsta tolerans på bara 5 cm."
När det gäller den maximala hastigheten som drönaren kunde uppnå när den passerade genom gapet, 2,5 m/s, Ackerman sa att den "främst begränsades av kameran med rullande slutare (som kan störa det optiska flödet vid högre hastigheter), men igen, den här metoden är egentligen inte avsedd för högpresterande drönare."
Varför deras arbete är viktigt:det här dokumentet tar upp problemet med gapdetektering av en okänd form och plats med en monokulär kamera och avkänning ombord. Det är inte att säga, frågan om att gå igenom luckor är ny. Författarna påpekade att "problemet med att gå igenom luckor har fascinerat forskare sedan många år." Forskare på andra håll har presenterat algoritmer för planering och kontroll och författarna sa att vissa verk banade vägen för det bioinspirerade tillvägagångssätt som de använde i tidningen.
© 2018 Tech Xplore