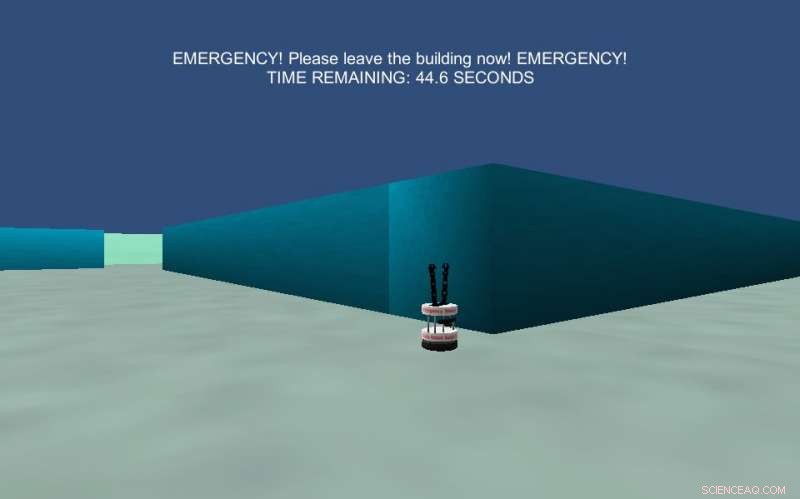
Bilden visar ett labyrintnavigeringsexperiment som beskrivs som en nödsituation. Deltagarna fick veta att deras uppgift var att agera som om de var i en nödutrymning och måste hitta en utgång inom 30 sekunder för att överleva. Kredit:Wagner et al.
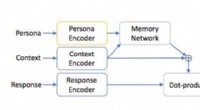
Forskare vid Pennsylvania State University, MIT och Georgia Institute of Technology har nyligen utvecklat en konceptuell ram för att modellera fenomenet human-robot trust. Deras ramar, beskrivs i ett papper publicerat på ACM Digital Library, använder beräkningsrepresentationer inspirerade av spelteori för att representera förtroende, ett begrepp definierat med hjälp av teori inom socialpsykologi.
Tillit spelar en nyckelroll i interpersonella interaktioner, både i professionella och personliga miljöer. När en person litar på en annan, de kan bestämma sig för att göra något som utsätter dem för stor risk, med tron att den andras handlingar något kommer att mildra denna risk.
När det gäller att definiera förtroende, många forskare är överens om att det innebär en situation där en individ är sårbar och denna sårbarhet vilar på handlingarna, motivationer, eller beteenden hos en annan. Alan R. Wagner, Paul Robinette, och Ayanna Howard, de tre forskarna bakom den senaste studien, ville skapa en ram som kan användas för att modellera mellanmänskligt förtroende mellan människor och robotar.
"Vi är intresserade av att utveckla robotar som vet när de ska lita på människor, förstå vilka situationer som kräver förtroende och locka till sig rätt förtroende från människor, "Robinette förklarade." Inledningsvis vi motiverades av forskning som tyder på att ibland gör människor udda saker när en robot ber dem att, som att slänga ut dyra läroböcker och hälla apelsinjuice på en krukväxt. Det finns också ett växande antal situationer där människor sätter sig själva i fara i händerna på en robot (t.ex. autonoma bilar, drönare som flyger över huvudet, robot säkerhetsvakter, etc.). Vi ville därför utveckla ett ramverk som gör att robotar kan förstå förtroendeförhållanden med människor. "
Det konceptuella ramverk som utvecklats av Wagner och hans kollegor genererade flera testbara hypoteser relaterade till förtroende mellan människor och robotar. I deras studie, forskarna undersökte dessa genererade hypoteser och körde en rad experiment, samla in både bevis som stödde deras ramverk och stred mot det.
"Tillitsramen började i Alans forskning, som definierade förtroende på ett sätt som datorer, och därmed robotar, kan använda, Sa Robinette.
I sitt tidigare arbete, Wagner definierade situationsförtroende som 'en tro, innehas av förtroendemannen, att förvaltaren kommer att agera på ett sätt som minskar förtroendemannarens risk i en situation där förtroendemannen har utsatt sina resultat för fara ”. Hans definition fokuserar främst på risken i en given situation, belyser också tron att en person/robot kommer att agera för att minska risken för den andra personen/roboten.
"Vår ram ger kriterier för vad som utgör en tillitsituation och ger flera kategorier av situationer som inte kräver förtroende, till exempel om det inte finns någon risk för förtroendemannen eller om risken inte kan minskas av en eller annan anledning, "Robinette sa." Med denna ram, en robot kan själv utvärdera om situationen den befinner sig i kräver förtroende eller inte, och agera sedan på lämpligt sätt. "
Forskarna testade hypoteserna som genererats av deras ramverk i en serie tester och experiment. Till exempel, i ett experiment, de presenterade en grupp mänskliga deltagare med scenarier som innebar att lita på eller inte lita på någon annan, frågade dem sedan vilket av dessa två alternativ de skulle välja. Deltagarna instämde i villkoren för förtroende som skapas av deras ramverk, i mycket hög grad.
Forskarna utförde flera andra experiment som utvärderade noggrannheten hos hypoteserna som genererades av deras konceptuella ramverk. Några av dessa samlade bevis som stöder dessa hypoteser, medan några gav motstridiga resultat.
"Jag tror att det mest meningsfulla fyndet från detta arbete är att vi hittade betydande stödjande bevis för denna ram i studier med många deltagare med olika bakgrund, "Robinette sa." Detta innebär att ramverket för förtroende kan användas i de flesta situationer, låta robotar bättre förstå varför människor runt omkring dem agerar som de gör. Roboten kan till och med kunna använda denna ram för att styra människor till mindre riskfyllda situationer, till exempel genom att inse att en person litar för mycket på en robot, kanske att göra något som det inte var programmerat för, och informera personen om sitt fel. "
Den ram som Wagner och hans kollegor utarbetade skulle kunna tillämpas på en mängd olika situationer som involverar förtroende mellan människor och robotar. Hur som helst, i vissa fall var ramens hypoteser inte tillräckligt korrekta, till exempel när människor ombads att lita på en robot i det som tycktes vara en nödsituation.
Dessa fynd är ändå värdefulla, eftersom de belyser specifika områden där människor har svårare att lita på robotar. Framtida forskning kan titta närmare på varför deltagarna gjorde dessa val och vad som hindrade dem från att lita på robotar, samtidigt som man undersöker hur robottekniker kan öka säkerheten kring robotar.
"Alan och Ayanna har arbetat med att utvidga denna forskning om robotar inom hälsovård, "Robinette sa." Jag tror att Alan också har ett projekt för att undersöka nödutrymningsrobotar och deras förhållande till människor mer detaljerat. Jag har nyligen arbetat med mänsklig-maskin-teaming och planerar att tillämpa detta förtroendeskapande för förhållandet mellan människor och robotarna som de arbetar med. "
© 2018 Science X Network