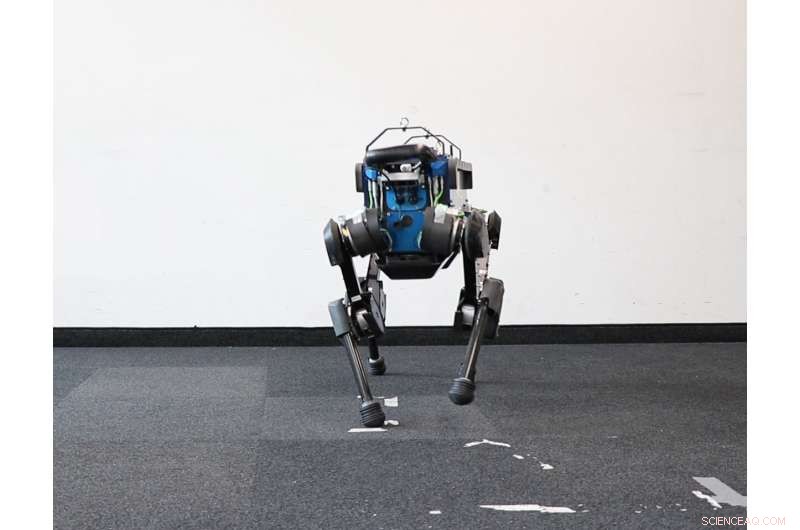
ANYmal-roboten. Kredit:Hwangbo et al., Sci. Robot. 4, eaau5872 (2019)
Ett team av forskare med Robotic Systems Lab i Schweiz och Intelligent Systems Lab i Tyskland och USA har hittat ett sätt att tillämpa maskininlärning på robotik för att ge sådana maskiner större förmågor. I deras papper publicerad i tidskriften Vetenskapsrobotik , gruppen beskriver hur de tillämpade maskininlärning på robotik och på så sätt gav en hundliknande robot mer smidighet och snabbhet.
Maskininlärning har varit i nyheterna mycket på sistone, eftersom sådana system fortsätter att krypa upp på mänskliga förmågor och ge dem oöverträffade förmågor. I denna nya ansträngning, forskarna försökte tillämpa en del av samma förbättring på en hundliknande robot som heter ANYmal – en obunden maskin ungefär lika stor som en stor hund som kan gå runt på ett sätt som mycket liknar ett riktigt djurs. ANYmal skapades ursprungligen av ett team på Robotic Systems Lab och har kommersialiserats. Nu har företaget samarbetat med Intelligent Systems Lab för att ge roboten en förmåga att lära sig att göra de saker den gör genom övning, snarare än genom programmering.
Maskininlärning fungerar genom att sätta upp mål för ett system och sedan ge det ett sätt att testa sätt att uppnå dessa mål – ständigt förbättras när riktmärken uppnås. Testerna görs om och om igen, ibland tusentals gånger. Sådana tester är svåra med en robot både på grund av de många faktorer som är inblandade (som alla attribut som är involverade i att upprätthålla balans) och på grund av den enorma tidsinvesteringen. Efter att ha utarbetat ett sätt att lösa det första problemet, forskarna hittade en väg runt det andra. Istället för att ha NÅGON kamp genom sin inlärningsregim i den verkliga världen, forskarna skapade en virtuell version av roboten som kunde köras på en enkel stationär dator.
Forskarna noterar att det var ungefär 1 000 gånger snabbare att låta roboten lära sig medan den var i sin virtuella inkarnation än vad det skulle ha varit i den verkliga världen. De lät den virtuella hunden träna sig själv i upp till 11 timmar och laddade sedan ner resultaten till den fysiska roboten. Tester visade att tillvägagångssättet fungerade mycket bra. Den nya och förbättrade versionen av ANYmal var smidigare (kan förhindra en människa från att sparka över den och kunde rätta till sig om den ramlade) och den gick ungefär 25 procent snabbare.
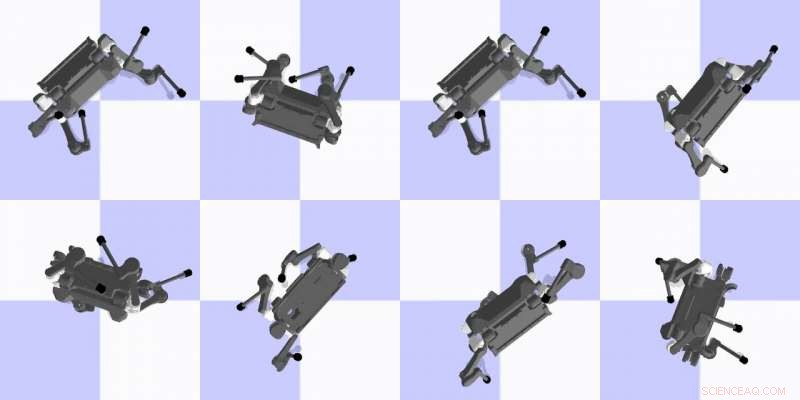
Olika fallkonfigurationer av ANYmal-roboten. Kredit:Hwangbo et al., Sci. Robot. 4, eaau5872 (2019)
© 2019 Science X Network