Precisions- (vänster) och kraft- (höger) grepp som genereras av greppplaneraren. Kredit:Lu &Hermans.
Forskare vid University of Utah har nyligen utvecklat en probabilistisk greppplanerare som explicit kan modellera grepptyper för att planera högkvalitativ precision och kraftgrepp i realtid. Deras övervakade inlärningsmetod, beskrivs i en tidning som förpublicerats på arXiv, kan effektivt planera både kraft- och precisionsgrepp för ett givet objekt.
För både människor och robotar, olika manipulationsuppgifter kräver olika typer av grepp. Till exempel, håller ett tungt verktyg, som en hammare, kräver ett kraftgrepp med flera fingrar som erbjuder stabilitet, medan du håller en penna kräver ett precisionsgrepp med flera fingrar, eftersom detta kan ge objektet skicklighet.
När man testar sin tidigare metod för att förstå planering, teamet av forskare vid University of Utah märkte att det nästan alltid genererade kraftgrepp där robotens hand sveper runt ett föremål, med stora kontaktområden mellan handen och föremålet. Dessa grepp är användbara för att utföra en mängd olika robotuppgifter, som att plocka upp föremål någon annanstans i rummet, ändå är de ohjälpsamma när de utför manipulationsuppgifter.
"Tänk på att flytta en pensel eller skalpell som du håller med fingertopparna, "Tucker Hermans, en av forskarna som genomförde studien, berättade för TechXplore. "Den här typen av uppgifter kräver precisionsgrepp, där roboten håller föremålet med fingertopparna. När man tittar på litteraturen, vi såg att befintliga metoder tenderar att generera bara ett slags grepp, antingen precision eller kraft. Så vi satte igång att skapa en greppsyntes som kan hantera båda. Den här vägen, vår robot kan använda kraftgrepp för att stabilt plocka och placera föremål den vill flytta, men precision greppar när den behöver utföra manipulationsuppgifter i handen."
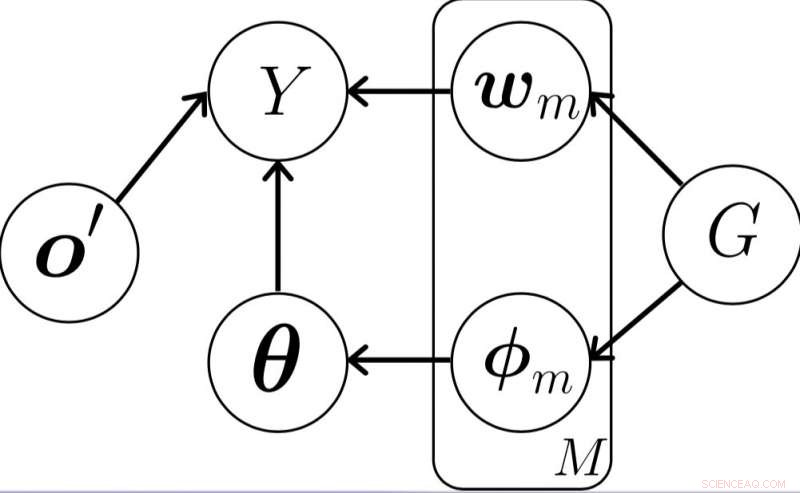
Den föreslagna probabilistiska grafiska modellen av grepptyp. Kredit:Lu &Hermans.
I strategin för att förstå planering som utarbetats av Hermans och hans kollega Qingkai Lu, en robot lär sig att förutsäga framgång från tidigare erfarenheter. Roboten försöker olika typer av grepp på olika föremål, registrera vilka av dessa som lyckades och vilka som misslyckades. Dessa data används sedan för att träna en klassificerare att förutsäga om ett givet grepp kommer att lyckas eller inte.
"Klassifieraren tar som indata en djupbild av objektet och den valda greppkonfigurationen (dvs. var man ska placera handen och hur man formar fingrarna), ", förklarade Hermans. "Förutom att förutsäga framgång, klassificeraren rapporterar hur säkert det är att greppet kommer att lyckas på en skala från noll till ett. När du får ett föremål att greppa, roboten planerar ett grepp genom att söka över olika möjliga grepp och välja det grepp som klassificeraren förutsäger den högsta förtroendet för att lyckas."
Den övervakade inlärningsmetod som utvecklats av Hermans och Lu kan planera olika typer av grepp för tidigare osynliga föremål, även när endast partiell visuell information är tillgänglig. Deras kan vara den första greppplaneringsmetoden för att explicit planera både kraft- och precisionsgrepp.
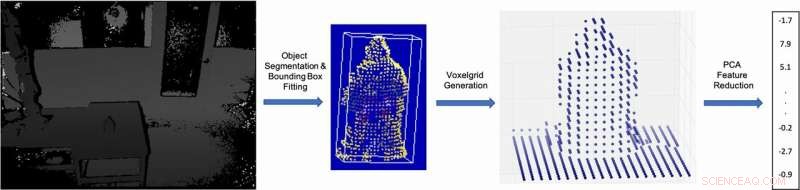
Illustration av utvinningsprocessen för visuella funktioner. Kredit:Lu &Hermans.

Exempel RGB-bild genererad av Kinect2-kameran som visar roboten och det legoliknande föremålet på bordet. Kredit:Lu &Hermans.
Forskarna utvärderade sin modell och jämförde den med en modell som inte kodar griptyp. Deras resultat tyder på att modellering av grepptyp kan förbättra framgångsgraden för genererade grepp, med deras modell som överträffar den andra metoden.
"Vi tror att våra resultat är viktiga på två meningsfulla sätt, " sa Hermans. "Först, vårt föreslagna tillvägagångssätt gör det möjligt för en robot att explicit välja den typ av grepp den önskar, lösa det problem som vi tänkte ta itu med. Andra, och potentiellt viktigare, Att lägga till denna kunskap av grepptyp i systemet förbättrar faktiskt robotens förmåga att framgångsrikt greppa objekt. Således, även om du bara vill ha en typ av grepp, säg makt grepp, det hjälper fortfarande att veta att precisionsgrepp finns när man lär sig att förstå."
Tillvägagångssättet som utarbetats av Hermans och Lu kan hjälpa utvecklingen av robotar som kan generera en mångsidig uppsättning grepp. Detta skulle i slutändan tillåta dessa robotar att utföra ett bredare utbud av uppgifter, som innebär olika typer av objektmanipulation.

Exempel på framgångsrika precisions- och kraftgrepp som genereras av den nya modelleringsmodellen av grepptyp för greppplanering. De två översta raderna är precisionsgrepp. De två nedre raderna är kraftgrepp. Kredit:Lu &Hermans.

Precision (vänster) och kraft (höger) grepp genererade av den nya greppplaneraren. Kredit:Lu &Hermans.
"Vi tittar nu på två direkta förlängningar av detta arbete, " sa Hermans. "Först, vi vill undersöka effekterna av att modellera fler typer av grepp, till exempel, att skilja mellan undertyper av precisionsgrepp som kännetecknas av att olika segment av fingret kommer i kontakt med föremålet. För att uppnå detta, vi planerar att utöka robothanden med hud för att möjliggöra automatisk detektering av var kontakter görs. Andra, vi vill inkludera mer information för att hjälpa till att automatiskt välja lämplig typ av grepp givet en begärd uppgift. Till exempel, hur kan roboten automatiskt bestämma att den ska använda ett precisionsgrepp för att skapa en målning, utan att operatören berättar det?"
© 2019 Science X Network