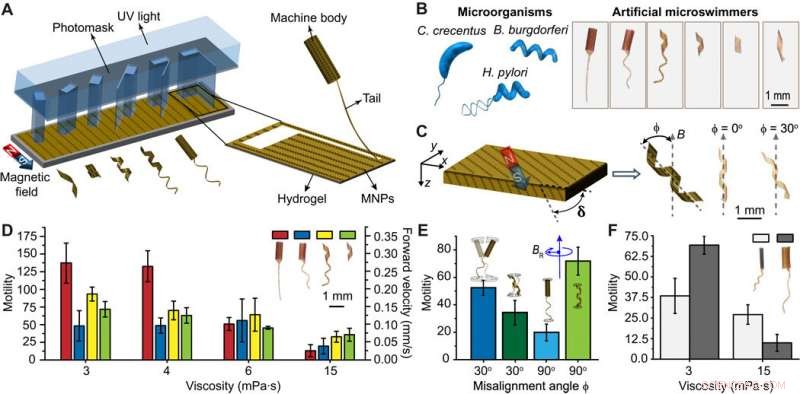
(A) En kirigami-strategi för att bygga massaanpassade mjuka mikrosimmare genom en enstegs fotolitografi. UV, ultraviolett. (B) Schematisk illustration av bakterierna som tagits som inspiration för denna studie och de optiska bilderna av de konstruerade konstgjorda mikrosimmare. (C) Out-of-plane anpassning (δ ≠ 0) av MNP leder till icke-noll felinriktning vinkel (ϕ). De optiska bilderna som visar två simmare med identiska former och varierande ϕ visas. (D) En jämförelse av rörligheten hos mikrosimmare som simmar i vätskor med olika viskositeter. (E) Rörlighet hos de flagellerade rörformiga mikrosimmare och spiralformade mikrosimmare kodade med två olika magnetiska anisotropier som roterar i en lösning med en viskositet på 3 mPa·s. (F) Effekt av kroppsstorlek på rörligheten hos de rörformiga mikrosimmare. Simmarna kördes vid 2 Hz med en fältstyrka på 20 mT i alla experiment, om inget annat anges. Alla stapeldiagram representerar medelvärde ± SEM (n =6 mätningar för varje mikrosimmare och tre olika simmare testade per tillstånd). Kredit:Science Advances, doi:10.1126/sciadv.aau1532
Bakterier uppvisar anmärkningsvärd plasticitet genom att utnyttja mekanik som svar på lokalt förändrade fysiska och kemiska förhållanden. Kompatibla strukturer hjälper vanligtvis taxibilarnas beteende att navigera i komplexa och strukturerade miljöer. Bioinspirerade mikrobiologiska mekanismer innehåller rationellt utformade arkitekturer som kan stora, olinjär deformation för att införa autonomi i konstruerade småskaliga enheter.
I en nyligen genomförd studie, H W. Huang och kollegor på avdelningarna för maskinteknik, tillämpad matematik och teoretisk fysik, analyserade effekterna av hydrodynamiska krafter och reologi av lokala omgivningar på simning vid lågt Reynolds-tal. I arbetet, de identifierade utmaningarna och fördelarna med att använda elasto-hydrodynamisk koppling i rörelse för att utveckla en serie maskiner för att bygga obundna mikrorobotar med självreglerande rörlighet. Forskarna kunde demonstrera kopplingen mellan de strukturella och magnetiska egenskaperna hos konstgjorda mikrosimmare med vätskans dynamiska egenskaper, under adaptiv rörelse i frånvaro av sensorer ombord. Resultaten är nu publicerade i Vetenskapens framsteg .
Mikroorganismer innehåller olika maskiner för molekylär rörelse för att effektivt navigera i komplexa miljöer och ekologiska nischer. I bakterier, simning uppstår från den mekaniska interaktionen mellan de aktiverade flagellerna, cellkroppen och det motstånd som genereras av flödet. Viskösa krafter vid lågt Reynolds tal är ansvariga för hydrodynamiskt motstånd, vilket i sin tur beror på formen på rörliga föremål.
För att optimera deras rörlighet, bakterier kan anta alternativa former och storlekar under sin livscykel. Förutom att ändra kroppsform, bakterier kan också använda framdrivningssystem för avancerad rörelse i komplexa miljöer. Till exempel, genom att böja en krok kan Caulobacter crescentus förbättra motiliteten, medan Vibrio alginolyticus kan överträffa multi-flagellerad Escherichia coli i klättring av näringsgradienter på grund av flagellär knäckningsinstabilitet. Vidare, Shewanella putrefaciens kan fly fysiska fällor via en polymorf övergång i flagelltråden.
Mikroskopiska konstgjorda simmare som forskare utvecklat via bioinspirerad mikroteknik för att röra sig genom kroppsvätskor, över biologiska barriärer och tillgång till avlägsna platser för sjukdomar skulle kunna revolutionera riktade terapier. Banbrytande arbete på området har redan visat möjligheten att efterlikna det prokaryota eller eukaryota flagellumet för att bygga magnetiskt kontrollerade mikrosimmare med icke-reciproka rörelser. Dock, till skillnad från levande celler, dessa mekaniska enheter kan inte känna av sin lokala miljö eller anpassa sig till förändringar i fysiska förhållanden. Att kontrollera konstgjorda material kan bana väg för att bygga inställbara, hållbara och robusta tekniska lösningar som autonoma biohybridrobotar.
I detta arbete, Huong et al. introducera en enkel och mångsidig metod baserad på materialtillverkning för att konstruera magnetiskt styrda mjuka mikromaskiner. Konceptet är baserat på ett 3D-omkonfigurerbart flerkroppssystem konstruerat av ett hydrogelmonoskikt av nanokomposit. I tidigare arbete utfört av samma forskargrupp, Huang et al. detaljerade formen och magnetiseringsprofilen för självvikta mikromaskiner i vilka strukturer kan programmeras oberoende av varandra genom att införliva magnetiska nanopartiklar (MNP) i mönstrade hydrogelskikt.
För denna studie, forskarna presenterade en uppsättning designstrategier för att självreglera rörelse och manövrerbarhet via samspelet mellan trögflytande, elastisk, magnetiska och osmotiska krafter. Huang et al. visade att den omkonfigurerbara kroppen kontinuerligt kunde förändras i enlighet med den omgivande vätskan, möjliggör rörelse genom förträngningar för förbättrad lokomotivprestanda. De visade att elasto-hydrodynamisk koppling i formskiftning och gånganpassningar kunde tillåta mikrobotar att navigera inuti blockerade, heterogena och dynamiska miljöer.
Kroppsplanens roll för manövrerbarhet. Spiralformade mikrosimmare visade den bästa prestandan som förväntat eftersom de inte hanterar kropps- och svanskoordination. Kredit:Science Advances, doi:10.1126/sciadv.aau1532.
Huang et al. konstruerade de mjuka mikrosimmare med hjälp av bioinspirerad rörelse med en variant av origami känd som kirigami. De kompatibla 3D-mikrostrukturerna designades från en termoresponsiv gel förstärkt med MNP (magnetiska nanopartiklar). Under tillverkningsprocessen, forskarna initierade skärning via fotolitografi och vikning vid hydratisering av det polymeriserade skiktet. Den olikformiga fördelningen av MNPs längs tjockleksriktningen möjliggjorde bildandet av två distinkta lager av hydrogeler med signifikant olika svällningsförhållanden.
Forskarna fokuserade på tre mikroorganismkonfigurationer, inklusive C. crescentus, Helicobacter pylori och Borrelia burgdorferi. Bakterierna simmar vanligtvis genom att rotera propellerliknande flagelltrådar som sträcker sig från cellkroppen. Biomimik av rörelsen kan tillåta konstgjorda mikrosimmare att röra sig, om maskinens magnetiska moment var vinkelrät mot dess långa axel. Dock, strukturerna liknade kompassnålar istället, genom att rikta in deras långa axel till riktningen för det externa magnetfältet. För att övervinna denna begränsning, Huang et al varierade anpassningen utanför planet av de medfödda MNP:erna i materialet, samtidigt som partikelinriktningen i planet hålls konstant.
Registrerar magnetiseringsprofilen dynamiskt. Magnetiskt förstärkta nanokompositer var i en annan riktning än riktningen för MNP-inriktning. Det applicerade fältet var betydligt högre än det magnetiska fältet som applicerades för att rikta in partiklar under tillverkningen av mikrobotarna. Kredit:Science Advances, doi:10.1126/sciadv.aau1532.
För att optimera rörelse vid olika viskositeter, mikrostrukturerna fick olika gångarter. Att systematiskt utforska den potentiella fördelen med morfologisk mångfald Huong et al. byggde mikrosimmare med olika kroppsplaner och aktiverade dem i vätskor med varierande viskositet. Forskarna kunde konstruera mikrosimmare som följde 3-D spiralformade banor genom att koordinera deras morfologi med deras magnetiseringsprofil. I alla experiment, Reynolds-talet varierade från 10 -2 till 10 -4 ; för att indikera simning under laminärt flöde.
I en lösning av sackaros med samma viskositet som blod, de flagellerade mikrosimarna med en flexibel plan svans och rörformig kropp rörde sig snabbare med spiralformade rörelser jämfört med andra prototyper. Flagelerade mikrosimmare gynnades av både spiral- och korkskruvsrörelser, medan spiralformade mikrosimmare utförde korkskruvsrörelser. Dock, under ökad viskositet minskade rörelsen hos alla mikrosimmare, men fallet var högst för flagellerade mikrosimmare med plan svans. Vid högre viskositet, Huong et al observerade att spiralformade mikrosimmare var de snabbaste, eftersom den enda relevanta rörelsen under förhållandena var korkskruvsrörelse.
Vid sidan av rörelse, förmågan att reglera rörelse (manövrerbarhet) spelar en nyckelroll för bakterier att känna av och detektera näringsgradienter. Forskarna testade manövrerbarheten hos konstgjorda mikrosimmare genom att inducera avböjningar i girvinkeln (rotation) under simning. En mycket manövrerbar mikrosimmare kunde ändra sin rörelseriktning snabbt med en liten förändring i styrsignalen. Under kraftigare störningar (45-graders girrotation) spelade både kropps- och svansgeometri en viktig roll i responsen från följsamma mikrosimmare. Strukturellt sett kroppen svarade på kontrollsignalen före svansen, eftersom magnetiseringen av kroppen var högre. Simmare med en plan svans visade högre mottaglighet för instabilitet, en spiralformad svans skulle jämförelsevis kunna bidra till stabilisering på grund av högre styvhet hos den spiralformade geometrin.
Formanpassning i krökta kanaler under axiellt flöde med en hastighet av 2 ml/min. Den observerade deformationen var elastisk, och simmare återställde fullständigt sin form efter att ha passerat genom hörnet under det externt applicerade flödet med en hastighet av 2 ml/min. Ökning av filamentens styvhet minskade deformation och ledde till blockering av kanalen. Kredit:Science Advances, doi:10.1126/sciadv.aau1532. 
Huong och medarbetare bestämde framdrivningseffektiviteten för följsamma simmare genom att koppla mellan de magnetiska krafterna, filamentflexibilitet och trögflytande motstånd. De undersökte de elasto-hydrodynamiska egenskaperna för att utlösa en gångövergång som svar på förändrad viskositet. Forskarna observerade lindning av mikrobotsvansen vid högre viskositet och frekvens. Den observerade morfologiska övergången eller transformationen, bidrog till korkskruvens rörelse för förbättrad mikrobotrörlighet.

Gånganpassning av rörformade mikrosimmare med elastisk svans. Elastohydrodynamiska egenskaper kan utnyttjas för att utlösa en gångövergång som svar på förändringar i låg och hög viskositet. Kredit:Science Advances, doi:10.1126/sciadv.aau1532.
Baserat på omfattande strategier för rörelse och manövrerbarhet, de data som erhölls i studien avslöjade att en rörformad kropp med en plan svans var att föredra framför att simma vid låg viskositet. Jämförelsevis, en spiralformad morfologi skulle kunna prestera bättre vid högre viskositet. Huong et al. konstruerade en magnetiskt omkonfigurerbar mikrosimmare för att genomgå formtransformation mellan de två konfigurationerna baserat på yttre förhållanden. De programmerade mikrosimmare kunde ändra form för ihållande framåthastighet och förbättrad manövrerbarhet trots ökade viskösa krafter.
På det här sättet, noggranna analyser av simprestanda vid varierande viskositeter gav en riktlinje för att bygga en enda mikromaskin. För att lösa navigeringsproblemet på mikro/nanoskala, Huong et al. minskat antalet element som ska kontrolleras för de resulterande fördelarna med hastighet, mångsidighet och kostnad. Mikrobotarna kan tillverkas med hög genomströmning och skalbara metoder för att öppna dörrar för utveckling av en rad mjuka mikrorobotar för medicinska och industriella applikationer.
© 2019 Science X Network