Ett internationellt team av forskare har utvecklat ett uppfattningssystem för mjuka robotar inspirerat av hur människor bearbetar information om sin egen kropp i rymden och i förhållande till andra objekt och människor. De beskriver systemet, som inkluderar ett rörelseupptagningssystem, mjuka sensorer, ett neuralt nätverk, och ett mjukt robotfinger, i 30 januari -numret av Science Robotics . Upphovsman:University of California San Diego
Ett internationellt team av forskare har utvecklat ett uppfattningssystem för mjuka robotar inspirerat av hur människor bearbetar information om sin egen kropp i rymden och i förhållande till andra objekt och människor. De beskriver systemet, som inkluderar ett rörelseupptagningssystem, mjuka sensorer, ett neuralt nätverk, och ett mjukt robotfinger, i 30 januari -numret av Science Robotics .
Forskarnas yttersta mål är att bygga ett system som kan förutsäga en robots rörelser och inre tillstånd utan att förlita sig på externa sensorer, ungefär som människor gör varje dag. I deras Science Robotics papper, de visar att de har uppnått detta mål för ett mjukt robotfinger. Arbetet har tillämpningar inom människa-robot-interaktion och bärbar robotik, samt mjuka anordningar för att korrigera störningar som påverkar muskler och ben.
Systemet är avsett att efterlikna de olika komponenter som krävs för att människor ska kunna navigera i sin omgivning:rörelsefångningssystemet står för syn; det neurala nätverket står för hjärnans funktioner; sensorerna för beröring; och fingret för kroppen som interagerar med omvärlden. Motion capture -systemet är där för att träna det neurala nätverket och kan kasseras när träningen är klar.
"Fördelarna med vårt tillvägagångssätt är förmågan att förutsäga komplexa rörelser och krafter som den mjuka roboten upplever (vilket är svårt med traditionella metoder) och det faktum att det kan appliceras på flera typer av ställdon och sensorer, "sa Michael Tolley, professor i maskin- och rymdteknik vid University of California San Diego och tidningens seniorförfattare. "Vår metod inkluderar också redundanta sensorer, vilket förbättrar den övergripande robustheten i våra förutsägelser. "

Det mjuka robotfingret ger haptisk och rörlig information till systemet. Upphovsman:University of California San Diego
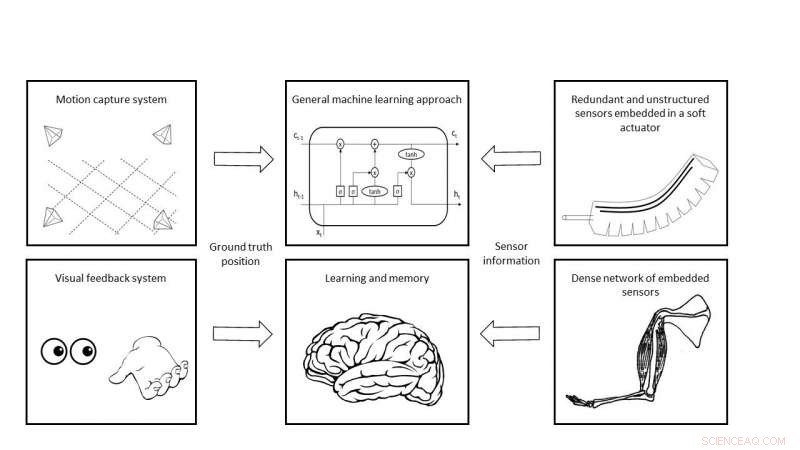
Översikt över modelleringsarkitekturen och dess parallell till det mänskliga uppfattningssystemet. Upphovsman:University of California San Diego
Forskare inbäddade mjuka töjningssensorer godtyckligt i det mjuka robotfingret, att veta att de skulle vara lyhörda för en mängd olika rörelser, och använde maskininlärningstekniker för att tolka sensornas signaler. Detta tillät laget, som inkluderar forskare från Bioinspired Robotics and Design Lab vid UC San Diego, att förutsäga krafter som appliceras på, och rörelser av, fingret. Detta tillvägagångssätt kommer att göra det möjligt för forskare att utveckla modeller som kan förutsäga krafter och deformationer som upplevs av mjuka robotsystem när de rör sig.
Detta är viktigt eftersom de tekniker som traditionellt används inom robotik för behandling av sensordata inte kan fånga de komplexa deformationerna av mjuka system. Dessutom, informationen som sensorerna fångar är lika komplex. Som ett resultat, sensordesign, placering och tillverkning i mjuka robotar är svåra uppgifter som skulle kunna förbättras avsevärt om forskare hade tillgång till robusta modeller. Detta är vad forskargruppen hoppas kunna ge.
Nästa steg inkluderar att skala upp antalet sensorer för att bättre efterlikna den täta avkänningsförmågan hos biologisk hud och stänga öglan för återkopplingskontroll av ställdonet.