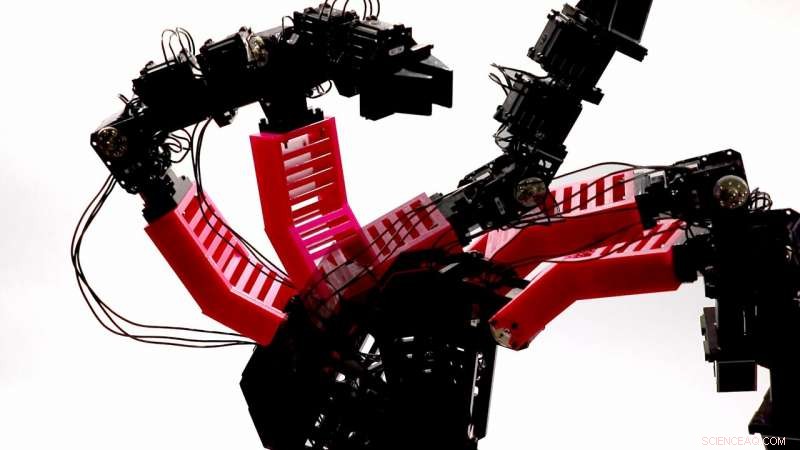
En bild av den deformerade robotarmen i flera poser när den samlade data genom slumpmässig rörelse. Upphovsman:Robert Kwiatkowski/Columbia Engineering
Roboter som är självmedvetna har varit science fiction-foder i decennier, och nu kan vi äntligen närma oss. Människor är unika i att kunna föreställa sig själva - att föreställa sig själva i framtida scenarier, som att promenera längs stranden en varm solig dag. Människor kan också lära sig genom att gå tillbaka till tidigare erfarenheter och reflektera över vad som gick rätt eller fel. Medan människor och djur förvärvar och anpassar sin självbild under sin livstid, de flesta robotar lär sig fortfarande med hjälp av simulatorer och modeller som tillhandahålls av människor, eller mödosamt, tidskrävande prov och fel. Robotar har inte lärt sig simulera sig själva som människor gör.
Columbia Engineering forskare har gjort ett stort framsteg inom robotik genom att skapa en robot som lär sig vad det är, från början, med ingen förkunskap om fysik, geometri, eller motordynamik. Ursprungligen vet inte roboten om det är en spindel, en orm, en arm - den har ingen aning om vad dess form är. Efter en kort period av "babblande, "och inom ungefär en dag med intensiv databehandling, deras robot skapar en självsimulering. Roboten kan sedan använda den självsimulatorn internt för att begrunda och anpassa sig till olika situationer, hantera nya uppgifter samt upptäcka och reparera skador i den egna kroppen. Verket publiceras idag i Science Robotics .
Hittills, robotar har drivits genom att en människa uttryckligen modellerar roboten. "Men om vi vill att robotar ska bli oberoende, att snabbt anpassa sig till scenarier som deras skapare inte har förutsett, då är det viktigt att de lär sig att simulera sig själva, "säger Hod Lipson, professor i maskinteknik, och chef för Creative Machines lab, där forskningen gjordes.
För studien, Lipson och hans doktorand studenten Robert Kwiatkowski använde en fyra graders frihet ledad robotarm. Initialt, roboten rörde sig slumpmässigt och samlade ungefär tusen banor, var och en består av hundra poäng. Roboten använde sedan djupinlärning, en modern maskininlärningsteknik, att skapa en självmodell. De första självmodellerna var ganska felaktiga, och roboten visste inte vad det var, eller hur dess leder var anslutna. Men efter mindre än 35 timmars träning, självmodellen blev konsekvent med den fysiska roboten till inom cirka fyra centimeter. Självmodellen utförde en plock-och-plats-uppgift i ett system med sluten slinga som gjorde det möjligt för roboten att kalibrera sin ursprungliga position mellan varje steg längs banan helt baserat på den interna självmodellen. Med kontrollen för sluten slinga, roboten kunde greppa föremål på specifika platser på marken och lägga dem i en behållare med 100 procent framgång.
Även i ett öppet system som innebär att utföra en uppgift helt baserad på den interna självmodellen, utan extern feedback, roboten kunde slutföra pick-and-place-uppgiften med en framgångsgrad på 44 procent. "Det är som att försöka ta upp ett glas vatten med slutna ögon, en process som är svår även för människor, "observerade studiens huvudförfattare Kwiatkowski, en doktorsexamen student på datavetenskapliga avdelningen som arbetar i Lipsons laboratorium.
Den självmodellerande roboten användes också för andra uppgifter, som att skriva text med en markör. För att testa om självmodellen kan upptäcka skador på sig själv, forskarna 3D-skrivit ut en deformerad del för att simulera skador och roboten kunde upptäcka förändringen och träna om sin självmodell. Den nya självmodellen gjorde det möjligt för roboten att återuppta sina pick-and-place-uppgifter med liten förlust av prestanda.

En bild av den intakta robotarmen som används för att utföra alla uppgifter Credit:Robert Kwiatkowski/Columbia Engineering
Lipson, som också är medlem i Data Science Institute, noterar att självavbildning är nyckeln till att göra det möjligt för robotar att röra sig bort från begränsningarna av så kallad "smal-AI" mot mer allmänna förmågor. "Det här är kanske vad ett nyfött barn gör i sin spjälsäng, när den lär sig vad det är, "säger han." Vi antar att denna fördel också kan ha varit det evolutionära ursprunget till självmedvetenhet hos människor. Även om vår robots förmåga att föreställa sig själv fortfarande är rå jämfört med människor, vi tror att denna förmåga är på väg till maskinens självmedvetenhet. "
Lipson tror att robotik och AI kan erbjuda ett nytt fönster in i det medvetna pusslet. "Filosofer, psykologer, och kognitiva forskare har funderat på naturens självmedvetenhet i årtusenden, men har gjort relativt små framsteg, "observerar han." Vi täcker fortfarande vår brist på förståelse med subjektiva termer som "verklighetens duk, "men robotar tvingar oss nu att översätta dessa vaga föreställningar till konkreta algoritmer och mekanismer."
Lipson och Kwiatkowski är medvetna om de etiska konsekvenserna. "Självmedvetenhet kommer att leda till mer motståndskraftiga och adaptiva system, but also implies some loss of control, " they warn. "It's a powerful technology, but it should be handled with care."
The researchers are now exploring whether robots can model not just their own bodies, but also their own minds, whether robots can think about thinking.