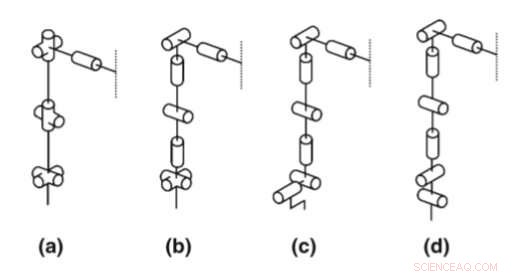
Visualisering av högerarmsledskonfigurationen för ett antal robotar med 7 DOF-armar. Den prickade linjen representerar kroppens mittlinje. en ASIMO, b ARMAR-III, c WABIAN-2, d iCub Kredit:Van de Perre et al.
Sociala robotar är designade för att kommunicera med människor naturligt, hjälpa dem med en mängd olika uppgifter. Effektiv användning av gester kan avsevärt förbättra interaktioner mellan robot och människa, låter robotar kommunicera både verbalt och icke-verbalt.
Designen av de flesta sociala robotar är inspirerad av människokroppen, eftersom detta gör det lättare att replikera mänskliga gester och beteenden. Dock, olika robotar kan ha olika morfologier, som gör det möjligt för dem att på bästa sätt ta sig an de uppgifter som de är designade för att slutföra.
Forskare vid Vrije Universiteit Brussel, i Belgien, har nyligen introducerat ett nytt tillvägagångssätt baserat på en generisk gestmetod för att studera påverkan av olika designaspekter. Deras papper, publicerad på Springer's International Journal of Social Robotics , presenterar ett ramverk som snabbt genererar gester som matchar en robots specifika konfiguration.
"I det här pappret, vi föreslår en ny metodik för att studera inflytandet av olika designaspekter baserat på en generisk gestmetod, " skrev forskarna i sin uppsats. "Gestmetoden utvecklades för att övervinna svårigheterna med att överföra gester till olika robotar, tillhandahålla en lösning på korrespondensproblemet."
Metoden som detta team av forskare utarbetade kunde övervinna svårigheterna med att överföra gester till robotar av olika former och konfigurationer. Användare kan mata in en robots morfologiska information och verktyget kommer att använda dessa data för att beräkna gesterna för den roboten.
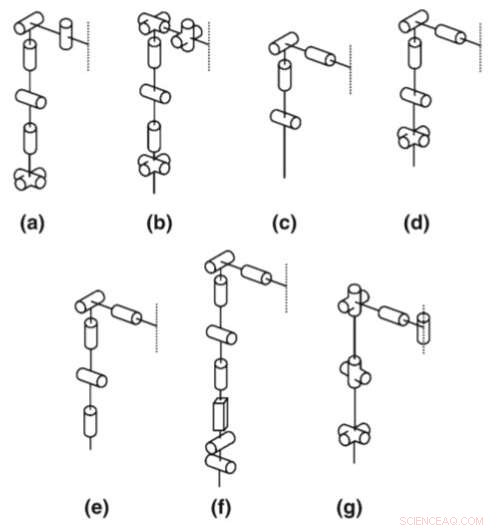
Visualisering av högerarmsledskonfigurationen hos ett antal robotar med olika armmorfologier. Den prickade linjen representerar kroppens mittlinje. en Pyrène, b WE-4RII, c Robovie, d KHR-3, e NAO, f R1, g ARMAR-IV. Kredit:Van de Perre et al.
"En liten uppsättning morfologisk information, inmatad av användaren, används för att utvärdera det generiska ramverket för programvaran vid körning, " förklarade forskarna. "Därför, gester kan beräknas snabbt och enkelt för en önskad robotkonfiguration. Genom att generera en uppsättning gester för olika morfologier, Vikten av specifika leder och deras inverkan på en rad ställningar och gester kan studeras."
För att säkerställa att deras metod skulle vara tillämpbar på olika typer av robotar, forskarna hämtade inspiration från en mänsklig basmodell. Denna modell består av olika kedjor och block, som används för att modellera människors olika rotationsmöjligheter. Forskarna tilldelade en referensram till varje ledblock med den mänskliga basmodellen som referens för att konstruera det allmänna ramverket bakom deras metod.
"För att generera gester för en viss robotmodell, metoden använder Denavit-Hartenberg (DH) parametrarna för konfigurationen som indata, varvid robotens olika leder grupperas i kedjor och block av den mänskliga basmodellen, " förklarade forskarna i sin uppsats. "Vid körning, det generiska ramverket för metoden utvärderas med hjälp av denna information, och som sådan, anpassad till den aktuella roboten."
Eftersom olika funktioner är viktiga för olika typer av gester, metoden som forskarna tagit fram är utformad för att fungera på två olika sätt, nämligen blockläget och sluteffektorläget. Blockläget används för att beräkna gester som känslomässiga uttryck i fall då den övergripande armplaceringen är avgörande. Sluteffektorläget, å andra sidan, beräknar gester i situationer där sluteffektorns position är viktig, t.ex. under objektmanipulation eller pekning.
"Gestmetoden bevisar sin användbarhet i designprocessen för sociala robotar genom att ge ett intryck av den nödvändiga mängden komplexitet som behövs för en specificerad uppgift, och kan ge intressanta insikter i det erforderliga ledvinkelområdet, " sa forskarna.
I deras studie, forskarna tillämpade sin metod på den virtuella modellen av en robot som heter Probo. De använde det här exemplet för att illustrera hur deras metod kunde hjälpa till att studera samlokaliseringen av olika leder och ledvinkelområden i gester. I framtiden, deras tillvägagångssätt kan hjälpa utvecklingen av sociala robotar som kan utföra naturliga gester anpassade till deras morfologi och tillämpning.
© 2019 Science X Network