Illustration av roboten som används av forskarna. Kredit:Nordmoen et al.
En av de viktigaste utmaningarna för robotforskning är utvecklingen av effektiva och motståndskraftiga styrsystem, som tillåter robotar att navigera i en mängd olika miljöer och hantera oväntade händelser. Forskare vid universitetet i Oslo har nyligen utvecklat en utvecklad förkroppslig faskoordinationsteknik för robust fyrfotsrobotrörelse. Deras arbete, publicerad på arXiv, sponsrades delvis av Norges forskningsråd.
"Den motiverande faktorn för oss var observationen att vissa robotbeteenden som vi tränade i simulering inte fungerade korrekt när de testades på den riktiga roboten, "Jörgen Nordmoen, en av forskarna inblandade i studien, berättade för TechXplore. "Denna observation är en känd utmaning, ofta kallad "verklighetsklyftan, ' och vi ville se om användning av sensordata kunde hjälpa till att övervinna denna utmaning."
För att effektivt minska "verklighetsklyftan" som ofta observeras i robotikstudier, Nordmoen och hans kollegor ville kombinera centrala mönsterritare (CPG) med feedback från robotens kropp och sensorer. CPG:er är en populär metod för att generera rytmiska vågor eller motoriska mönster i robotar, som kan användas som underlag för rörelse. Konstgjorda CPGs är inspirerade av ryggmärgen hos djur, som är kända för att innehålla neuroner som genererar rytmiska signaler i frånvaro av sensorisk information.
"CPG är relativt enkla att träna, dock, de innehåller inte i sig någon information om omvärlden, "Våra huvudmål var att se om vi framgångsrikt kunde kombinera ett komplext CPG-nätverk med inbyggd faskoordination och om inkorporeringen av sensordata kunde förbättra hur roboten betedde sig i den verkliga världen."
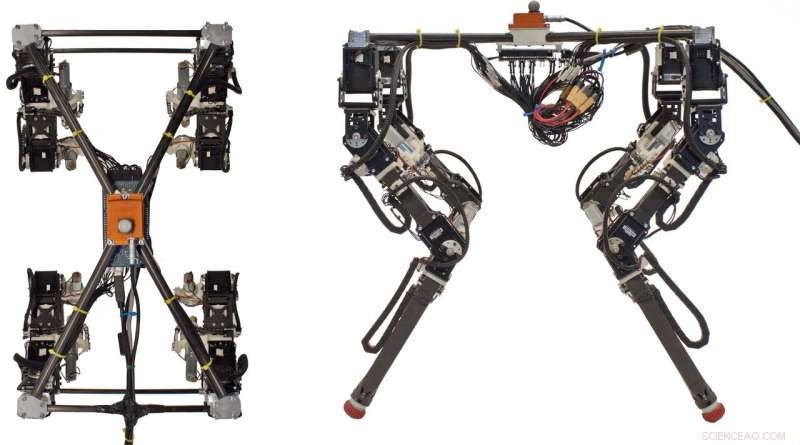
Bilder på roboten som forskarna använder. Kredit:Nordmoen et al.
Förkroppsligade faskoordinationstekniker fungerar genom att känna av hur mycket tryck roboten lägger i var och en av dess fötter, använder denna mätning för att kontrollera synkroniseringen av dess ben. I deras studie, forskarna använde en minimalistisk metod som kallas TEGOTAE, som använder sensoråterkoppling för emergent faskoppling mellan robotens ben.
Vanligtvis, i robotar med ben, varje ben är uttryckligen koordinerat med de andra, vilket innebär att ett ben alltid känner till den relativa positionen för andra ben. I kontrast, i den förkroppsligade faskoordineringsmetoden som utarbetats av Nordmoen och hans kollegor, varje ben är frikopplat från de andra och kroppen själv framtvingar implicit synkroniseringen mellan benen. Fottryckssensorn som lagts till av forskarna möjliggör implicit synkronisering, i slutändan förbättrar robotens koordination.
"Vår metod använder en mer komplex CPG än andra metoder, använda förkroppsligad faskoordination och utföra experimenten på en mer komplex robot, sade Nordmoen. Dessutom vi tränade CPG med en evolutionär optimeringsalgoritm, som tillsammans med den förkroppsligade faskoordinationen gör att gångrytmen automatiskt anpassar sig till roboten och miljön."
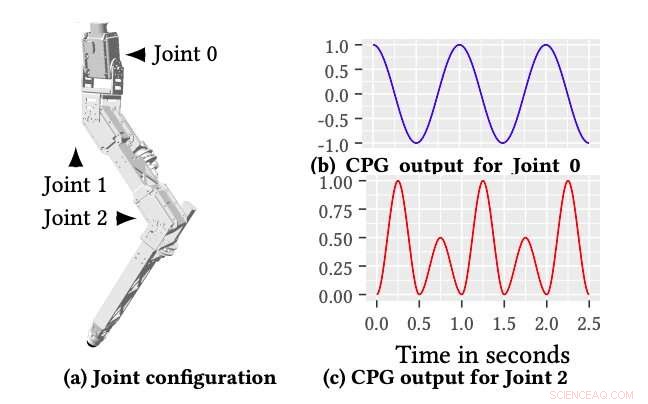
(a) visar en visuell representation av ett ben på roboten med leder markerade. (b) visar ett exempel på styrkurva för Joint 0 och Joint 1 medan (c) visar ett exempel på styrkurva för Joint 2. Kredit:Nordmoen et al.
I deras studie, forskarna tillämpade sin metod på DyRET, en fyrbent robot med däggdjursmorfologi. De tränade först den fyrdubbla roboten i simuleringar, och överförde därefter sina tester till den verkliga världen för att verifiera om träningen var effektiv. Detta gjorde det möjligt för dem att utvärdera sin teknik innan de tillämpade den i verkliga scenarier utan att orsaka skada på roboten.
"Praktiskt sett, vårt arbete kan leda till robotar med ben som är bättre på att anpassa sig till sin omgivning, på så sätt hantera olika miljöer, ", sa Nordmoen. "Detta inkluderar att underlätta överföringen av robotstyrenheter från simulering till den verkliga världen. Som vi skrev i tidningen, robotar med ben har möjligheten att hjälpa till på användarens villkor med liten justering som behövs från användaren jämfört med hjulförsedda robotar."
Tekniken som utvecklats av Nordmoen och hans kollegor skulle kunna underlätta utvecklingen av robotar med mer robusta rörelseförmåga. I framtiden, andra forskare skulle kunna integrera metoden i sina robotar eller hämta inspiration från denna studie för att utveckla liknande tekniker. Enligt Nordmoen svårigheterna förknippade med att integrera sensorfeedback i robotar med ben och enkelheten i denna nya förkroppsligade faskoordineringsmetod kan vara en bra utgångspunkt för framtida forskning.
"Vi arbetar för närvarande på att bättre förstå mekanismen som ligger till grund för förkroppslig faskoordination, ", tillade han. "Detta kommer förhoppningsvis att tillåta oss att förbättra konceptet och generera bättre rörelsestrategier. Dessutom, vi skulle vilja se hur den förkroppsligade faskoordinationen påverkas om själva roboten förändras. Med vår unika robot, DyRET, vi har förmågan att ändra robotens morfologi och kan testa hur sådana förändringar skulle påverka vårt tillvägagångssätt."
© 2019 Science X Network