Kredit:Harvard University
Dåliga nyheter för ofiofober:Forskare från Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) har utvecklat en ny och förbättrad orminspirerad mjuk robot som är snabbare och mer exakt än sin föregångare.
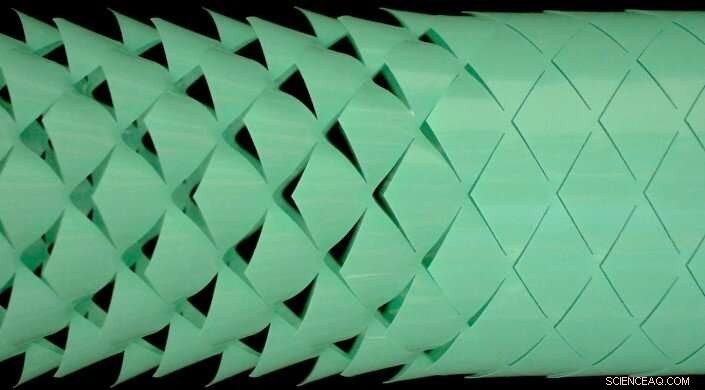
Roboten är gjord med kirigami - ett japanskt pappershantverk som förlitar sig på nedskärningar för att ändra materialets egenskaper. När roboten sträcker sig, kirigami-ytan "dyker upp" i en 3D-texturerad yta, som greppar marken precis som ormskinn.
Första generationens robot använde ett platt kirigami-ark, som transformerades enhetligt när den sträcktes. Den nya roboten har ett programmerbart skal, vilket betyder att kirigamisnittet kan dyka upp efter önskemål, förbättra robotens hastighet och noggrannhet.
Forskningen publicerades i Förfaranden från National Academy of Sciences .
"Detta är ett första exempel på en kirigami-struktur med icke-enhetliga popup-deformationer, sa Ahmad Rafsanjani, en postdoktor vid SEAS och första författare till tidningen. "I platt kirigami, popup-fönstret är kontinuerligt, vilket betyder att allt dyker upp på en gång. Men i kirigami -skalet, pop up är diskontinuerligt. Denna typ av kontroll av formtransformationen kan användas för att designa lyhörda ytor och smarta skinn med on-demand-förändringar i deras struktur och morfologi. "
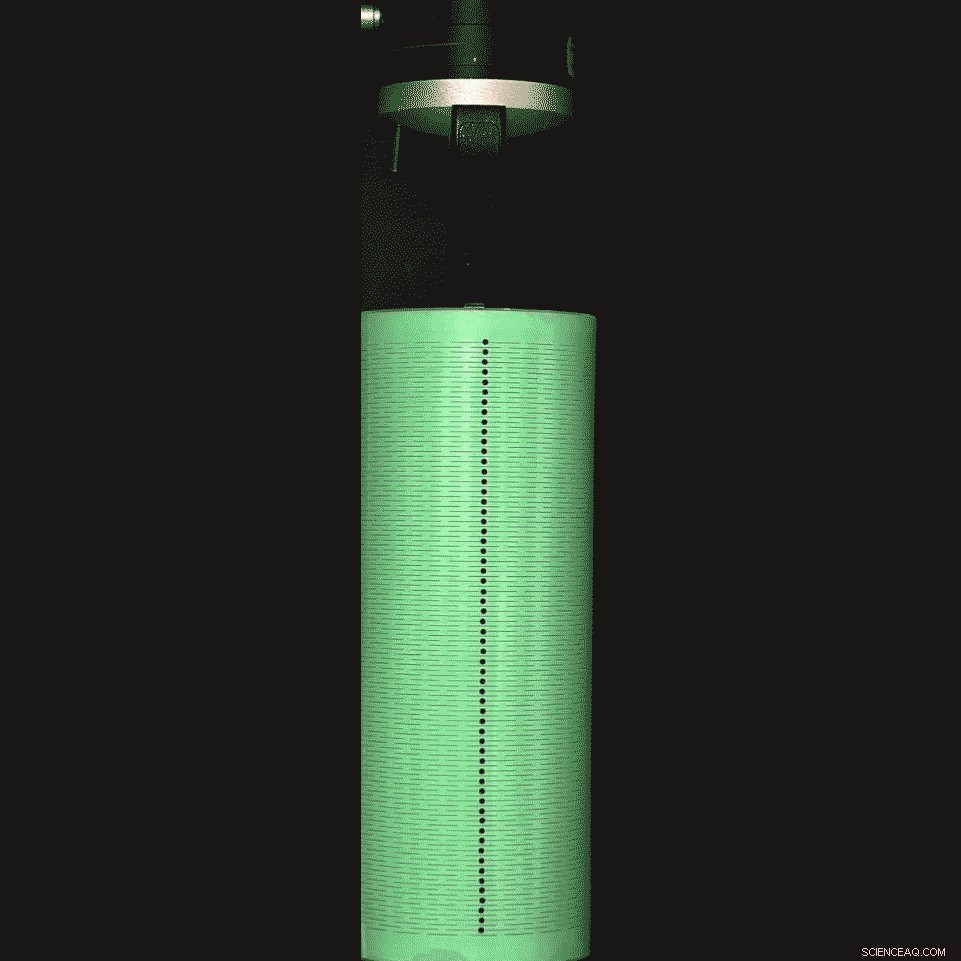
Den nya forskningen kombinerade två egenskaper hos materialet - storleken på snittet och arkets krökning. Genom att kontrollera dessa funktioner, forskarna kunde programmera dynamisk spridning av popup -fönster från ena änden till en annan, eller kontrollera lokaliserade popup-fönster.
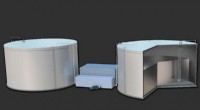
I tidigare forskning har ett plant kirigami -ark lindades runt ett elastomermotor. I denna forskning, kirigami -ytan rullas till en cylinder, med ett ställdon som utövar kraft i två ändar. Om snittet är av samma storlek, deformationen förökar sig från cylinderns ena ände till den andra. Dock, om storleken på snittet väljs noggrant, huden kan programmeras att deformeras vid önskade sekvenser.
Detta är en ny och förbättrad orminspirerad mjuk robot som är snabbare och smartare än föregångaren. Upphovsman:Harvard SEAS
"Genom att låna idéer från fasomvandlande material och tillämpa dem på kirigami-inspirerade arkitekterade material, vi visade att både poppade och opoppade faser kan samexistera samtidigt på cylindern, "sa Katia Bertoldi, William och Ami Kuan Danoff professor i tillämpad mekanik vid SEAS och seniorförfattare till tidningen. "Genom att helt enkelt kombinera snitt och krökning, vi kan programmera anmärkningsvärt olika beteenden. "
Nästa, forskarna siktar på att utveckla en invers designmodell för mer komplexa deformationer.
"Tanken är, om du vet hur du vill att huden ska förvandlas, du kan bara klippa, rulla och gå, "sa Lishuai Jin, en doktorand vid SEAS och medförfattare till artikeln.