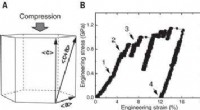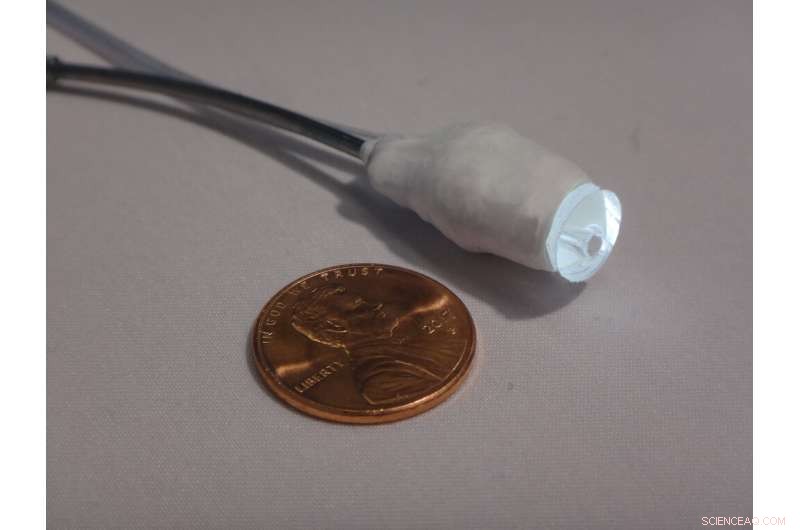
Spetsen på katetern bestod av en haptisk synsensor gjord av en millimeterskalig kamera och LED inkapslad i silikon. Kredit:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
Bioingenjörer vid Boston Children's Hospital rapporterar om den första demonstrationen av en robot som kan navigera självständigt inuti kroppen. I en djurmodell av hjärtklaffreparation, teamet programmerade en robotkateter för att leta sig längs väggarna i ett slag, blodfyllt hjärta till en läckande klaff—utan en kirurgs vägledning. De rapporterar sitt arbete i dag Vetenskapsrobotik .
Kirurger har använt robotar som drivs av joysticks i mer än ett decennium, och team har visat att små robotar kan styras genom kroppen av yttre krafter som magnetism. Dock, seniorutredare Pierre Dupont, Ph.D., chef för Pediatric Cardiac Bioengineering vid Boston Children's, säger att såvitt han vet, detta är den första rapporten som motsvarar en självkörande bil som navigerar till en önskad destination inuti karossen.
Dupont föreställer sig autonoma robotar som hjälper kirurger i komplexa operationer, minskar trötthet och frigör kirurger att fokusera på de svåraste manövrarna, förbättra resultaten.
"Det rätta sättet att tänka på detta är genom analogin av en stridspilot och ett stridsflygplan, " säger han. "Jaktplanet tar på sig rutinuppgifter som att flyga planet, så att piloten kan fokusera på uppdragets uppgifter på högre nivå."
Beröringsstyrd syn, informeras av AI
Teamets robotkateter navigerade med en optisk beröringssensor utvecklad i Duponts labb, informeras av en karta över hjärtats anatomi och preoperativa skanningar. Touchsensorn använder artificiell intelligens (AI) och bildbehandlingsalgoritmer för att göra det möjligt för katetern att ta reda på var den är i hjärtat och var den behöver ta vägen.
För demon, teamet utförde en mycket tekniskt krävande procedur som kallas paravalvulär aortaläckage, som reparerar ersättningshjärtklaffar som har börjat läcka runt kanterna. (Teamet konstruerade sina egna ventiler för experimenten.) När robotkatetern nådde läckageplatsen, en erfaren hjärtkirurg tog kontrollen och satte in en plugg för att stänga läckan.
I upprepade försök, robotkatetern lyckades navigera till hjärtklaffläckor på ungefär samma tid som kirurgen (med antingen ett handverktyg eller en joystick-kontrollerad robot).
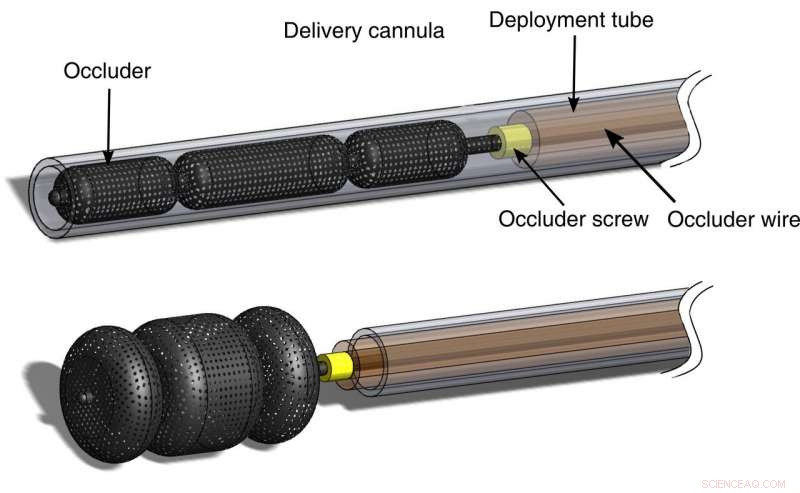
Ett diagram över ockluderingssystemet. Kredit:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
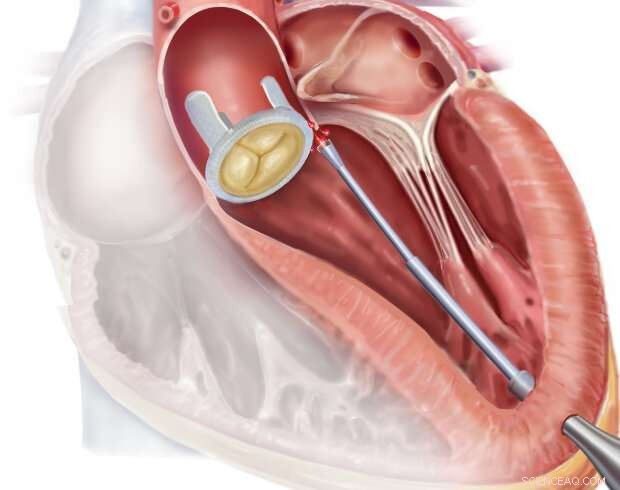
Illustration av robotkateternavigering till platsen för den läckande ventilprotesen. Kredit:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)

Kraftavkänningsverktyg anslutet till katetern. Kredit:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
Biologiskt inspirerad navigering
Genom en navigeringsteknik som kallas "wall following, "robotkateterns optiska beröringssensor provade sin miljö med jämna mellanrum, på ungefär samma sätt som insekters antenner eller morrhår från gnagare provar sin omgivning för att bygga mentala kartor över okända, mörka miljöer. Sensorn sa till katetern om den rörde vid blod, hjärtväggen eller en ventil (genom bilder från en spetsmonterad kamera) och hur hårt den tryckte (för att den inte skulle skada det slående hjärtat).
Data från preoperativ bildbehandling och maskininlärningsalgoritmer hjälpte katetern att tolka visuella egenskaper. På det här sättet, robotkatetern förs fram av sig själv från basen av hjärtat, längs väggen i vänster kammare och runt den läckande ventilen tills den nådde platsen för läckan.
"Algoritmerna hjälper katetern att ta reda på vilken typ av vävnad den rör vid, där det är i hjärtat, och hur den ska välja sin nästa rörelse för att komma dit vi vill att den ska gå, " förklarar Dupont.
Även om den autonoma roboten tog lite längre tid än kirurgen att nå den läckande ventilen, dess väggföljningsteknik gjorde att den tog den längsta vägen.
"Navigeringstiden var statistiskt likvärdig för alla, vilket vi tycker är ganska imponerande med tanke på att du är inne i det blodfyllda hjärtat som slår och försöker nå ett mål i millimeterskala på en specifik ventil, säger Dupont.
Han tillägger att robotens förmåga att visualisera och känna av sin omgivning skulle kunna eliminera behovet av fluoroskopisk avbildning, som vanligtvis används i denna operation och utsätter patienter för joniserande strålning.
En framtidsvision?
Dupont säger att projektet var det mest utmanande i hans karriär. Medan hjärtkirurgin, som utförde operationerna på svin, kunde slappna av medan roboten hittade ventilläckage, projektet belastade Duponts ingenjörsstipendiater, som ibland var tvungna att programmera om roboten mitt i driften när de fulländade tekniken.
"Jag minns gånger när ingenjörerna i vårt team gick ut ur operationsavdelningen helt utmattade, men vi lyckades få till det, " säger Dupont. "Nu när vi har demonstrerat autonom navigering, mycket mer är möjligt."
Vissa hjärtinterventionalister som är medvetna om Duponts arbete tänker sig att använda robotar för mer än navigering, utföra rutinmässiga hjärtkartläggningsuppgifter, till exempel. Vissa föreställer sig att denna teknik ger vägledning under särskilt svåra eller ovanliga fall eller hjälper till vid operationer i delar av världen som saknar mycket erfarna kirurger.
När Food and Drug Administration börjar utveckla ett regelverk för AI-aktiverade enheter, Dupont föreställer sig möjligheten att autonoma kirurgiska robotar över hela världen slår samman sina data för att kontinuerligt förbättra prestandan över tid – ungefär som att självkörande fordon i fält skickar tillbaka sina data till Tesla för att förfina sina algoritmer.
"Detta skulle inte bara jämna ut villkoren, det skulle höja det, " säger Dupont. "Varje kliniker i världen skulle arbeta på en nivå av skicklighet och erfarenhet som motsvarar de bästa inom sitt område. Detta har alltid varit medicinska robotars löfte. Autonomi kan vara det som tar oss dit."