Väl, var och en efter sin egen smak. Kattungar som blir vänner med garnbollar är absoluta magneter för videosurfare, men en rivaliserande armé av videoklicksters kan aldrig maxa stirra på humanoider som navigerar dit de vill.
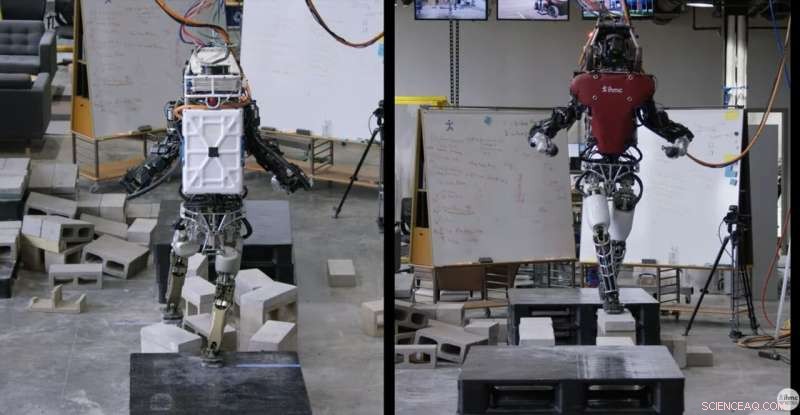
Den senaste videon som visar upp humanoida robotar på resande fot imponerar på tittarna med det skickliga och framgångsrika sättet de navigerar i en askeblockslabyrint.
Videon på den senare är IHMC, Institutet för mänsklig och maskinkognition (IHMC).
"Att gå genom en rörig och komplicerad miljö, " sa laget, robotar med ben måste ta reda på var de kan sätta sina fötter. Extra utmaning:Detta måste göras snabbt, om terrängen är platt eller komplex.
IHMC:s autonoma fotstegsplaneringsprogram är igång på både Boston Dynamics robot, och NASA-utvecklade Valkyrie.
Teamet använde de två robotarna, Atlas (Boston Dynamics) och Valkyrie (NASA Johnson Space Center) för den senaste utställningen. En annan nyckelfunktion var dess "huvud".
"Metoden använder maskinernas sensorer för att ta fram den mest effektiva vägen till en av människan utvald plats, " sa TNW.
"I denna video, " sa berättaren, "vi använder Carnegie Robotics MultiSense SL-huvudet för att generera punktmoln av miljön. Genom att segmentera detta punktmoln i plana områden, vi representerar den enorma mängden data som kommer från perceptionssensorerna i en mycket mer kompakt form."
De dekomponerade ytterligare dessa plana områden till en samling polygoner. Engadget :"Varje avsnitt tolkas sedan till en serie polygoner för att skapa en modell av miljön, så att roboten kan planera ut vart och ett av sina steg för att komma från sin startpunkt till sitt mål."
IHMC-teamet, under DARPA-utmaningen, hade tidigare använt Atlas-roboten. En operatör ledde Atlas. Fotsteg placerades i gränssnittet. Processen var långsam och belastade operatören. En annan nackdel var att deras placering av individuella fotsteg var felbenägen. Atlas föll under den första dagen av finaltävlingen.
Vid den här tiden, för att kringgå mänskliga fel, det nya systemet låter en operatör välja önskad plats, sa TNW , "men förlitar sig i slutändan på en algoritm för att ta reda på hur man får roboten dit och undviker hinder."
"I grund och botten, IHMC hanterar dessa komplexa navigeringsoperationer genom att ange en start- och slutpunkt för roboten, sa Darrell Etherington in TechCrunch , "och sedan kartlägga alla möjliga vägar steg för steg, att utvärdera kostnaden för var och en och i slutändan komma fram till en bästa möjliga väg - vilket allt kan ske relativt snabbt på modern hårdvara."
I en testscen visar den hur teamet låter roboten gå över en uppsättning askeblock, där det bara finns ett fåtal fotfästen som är möjliga. De kan också planera banor där roboten inte har något annat val än att bara använda partiella fotfästen.
För närvarande, sa de i sina videoanteckningar, smal terräng har en framgång på cirka 50 procent, ojämn terräng är cirka 90 procent, medan platt mark är nära 100 procent.
Pittsburgh, Pennsylvania-baserade Carnegie Robotics, under tiden, är en leverantör av avancerade robotsensorer och plattformar. Den ursprungliga MultiSense SL hade varit en valfri sensor för Atlas humanoida robotar i DARPA Robotics Challenge (DRC). Som det humanoida huvudet, SL tillhandahöll majoriteten av perceptuella data som användes för teleoperation samt automatiserad kontroll.
Vad kommer härnäst?
"Vi planerar att öka planerarens hastighet och förmågan att planera genom labyrinter och till osynliga mål, " sa de i videoanteckningarna.
Det är tydligt att teamet fortsätter sina försök att erövra tvåfotsgång.
IHMC-teamet sa lika mycket.
"Våra humanoidprojekt är fokuserade på att driva våra tvåfotade humanoider-kapaciteter framåt för att hantera ojämn terräng utan någon kunskap om miljön från sensorer ombord...Vi fokuserar också på förmågan att robust hantera externa störningar. Vårt mål är att hantera allt svårare promenadutmaningar."
Videon och papperet skickades till Humanoids 2019 - International Conference on Humanoid Robots-evenemang som äger rum senare i år.
© 2019 Science X Network