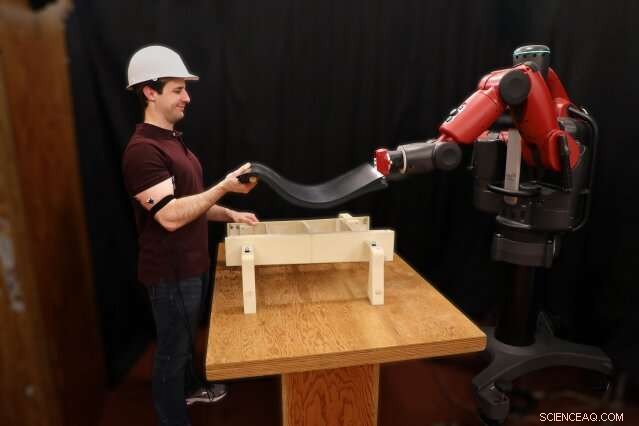
Huvudförfattaren Joseph DelPreto visar systemets förmåga att spegla sina rörelser genom att övervaka muskelaktivitet. Kredit:Joseph DelPreto/MIT CSAIL
Vi människor är väldigt bra på samarbete. Till exempel, när två personer arbetar tillsammans för att bära ett tungt föremål som ett bord eller en soffa, de tenderar att instinktivt koordinera sina rörelser, kalibrerar hela tiden för att se till att deras händer är i samma höjd som den andra personens. Vår naturliga förmåga att göra den här typen av justeringar gör att vi kan samarbeta i både stora och små uppgifter.
Men en dator eller en robot kan fortfarande inte följa en människas ledning med lätthet. Vi brukar antingen explicit programmera dem med maskinspeak, eller träna dem att förstå våra ord, à la virtuella assistenter som Siri eller Alexa.
I kontrast, forskare vid MIT:s datavetenskap och artificiell intelligens Laboratory (CSAIL) visade nyligen att ett smidigare samarbete mellan robot och människa är möjligt genom ett nytt system som de utvecklat, där maskiner hjälper människor att lyfta föremål genom att övervaka deras muskelrörelser.
Dubbad RoboRaise, systemet innebär att elektromyografisensorer (EMG) sätts på en användares biceps och triceps för att övervaka muskelaktivitet. Dess algoritmer upptäcker sedan kontinuerligt förändringar i personens armnivå, såväl som diskreta handgester upp och ner som användaren kan göra för finare motorkontroll.
Teamet använde systemet för en rad uppgifter som involverade att plocka upp och montera falska flygplanskomponenter. I experiment, användare arbetade med dessa uppgifter med roboten och kunde styra den till inom några centimeter från önskad höjd genom att lyfta och sedan spänna armen. Det var mer exakt när gester användes, och roboten svarade korrekt på ungefär 70 procent av alla gester.
Huvudförfattaren Joseph DelPreto visar systemets förmåga att spegla sina rörelser genom att övervaka muskelaktivitet. Kredit:Joseph DelPreto/MIT CSAIL
Doktorand Joseph DelPreto säger att han kunde föreställa sig människor som använder RoboRaise för att hjälpa till i tillverknings- och konstruktionsmiljöer, eller till och med som assistent i huset.
"Vårt tillvägagångssätt för att lyfta föremål med en robot syftar till att vara intuitivt och likna hur man kan lyfta något med en annan person – ungefär kopiera varandras rörelser samtidigt som man drar slutsatsen att det är användbara justeringar, " säger DelPreto, huvudförfattare på ett nytt papper om projektet med MIT-professorn och CSAIL-direktören Daniela Rus. "Nyckelinsikten är att använda ickeverbala ledtrådar som kodar instruktioner för hur man koordinerar, till exempel för att lyfta lite högre eller lägre. Att använda muskelsignaler för att kommunicera gör nästan roboten till en förlängning av dig själv som du flytande kan kontrollera."
Projektet bygger vidare på lagets befintliga system som tillåter användare att omedelbart korrigera robotmisstag med hjärnvågor och handgester, möjliggör nu kontinuerlig rörelse på ett mer kollaborativt sätt. "Vi strävar efter att utveckla människa-robot-interaktion där roboten anpassar sig till människan, snarare än tvärtom. På så sätt blir roboten ett intelligent verktyg för fysiskt arbete, säger Rus.
EMG-signaler kan vara knepiga att arbeta med:De är ofta mycket bullriga, och det kan vara svårt att förutsäga exakt hur en lem rör sig baserat på muskelaktivitet. Även om du kan uppskatta hur en person rör sig, hur du vill att roboten själv ska reagera kan vara oklart.
RoboRaise kommer runt detta genom att sätta människan i kontroll. Teamets system använder icke-invasiva, sensorer på kroppen som upptäcker avfyring av neuroner när du spänner eller slappnar av musklerna. Att använda wearables kommer också kring problem med ocklusioner eller omgivande buller, vilket kan komplicera uppgifter som involverar syn eller tal.
RoboRaises algoritm bearbetar sedan bicepsaktivitet för att uppskatta hur personens arm rör sig så att roboten ungefär kan efterlikna den, och personen kan spänna eller slappna av i armen för att flytta roboten upp eller ner. Om en användare behöver roboten för att flytta längre bort från sin egen position eller hålla en pose en stund, de kan bara göra en gest upp eller ner för bättre kontroll; ett neuralt nätverk upptäcker dessa gester när som helst baserat på biceps- och tricepsaktivitet.
En ny användare kan börja använda systemet mycket snabbt, med minimal kalibrering. Efter att ha satt på sensorerna, de behöver bara spänna och slappna av i armen några gånger och sedan lyfta en lätt vikt till några höjder. Det neurala nätverket som upptäcker gester tränas endast på data från tidigare användare.
Teamet testade systemet med 10 användare genom en serie av tre lyftexperiment:ett där roboten inte rörde sig alls, en annan där roboten rörde sig som svar på deras muskler men inte hjälpte till att lyfta föremålet, och en tredje där roboten och personen lyfte ett föremål tillsammans.
När personen fick feedback från roboten – när de kunde se den röra sig eller när de lyfte något tillsammans – var den uppnådda höjden betydligt mer exakt jämfört med att ha ingen feedback.
Teamet testade också RoboRaise på monteringsuppgifter, såsom att lyfta en gummiduk på en basstruktur. Den kunde framgångsrikt lyfta både stela och flexibla föremål på baserna. RoboRaise implementerades på lagets Baxter humanoid robot, men teamet säger att den skulle kunna anpassas för vilken robotplattform som helst.
I framtiden, Teamet hoppas att genom att lägga till fler muskler eller olika typer av sensorer i systemet kommer det att öka frihetsgraderna, med det yttersta målet att göra ännu mer komplexa uppgifter. Ledtrådar som ansträngning eller trötthet från muskelaktivitet kan också hjälpa robotar att ge mer intuitiv hjälp. Teamet testade en version av systemet som använder biceps- och tricepsnivåer för att berätta för roboten hur styvt personen håller i sin ände av föremålet; tillsammans, människan och maskinen kan flytande släpa runt ett föremål eller dra det hårt.
Den här historien återpubliceras med tillstånd av MIT News (web.mit.edu/newsoffice/), en populär webbplats som täcker nyheter om MIT-forskning, innovation och undervisning.