Upphovsman:Arrichiello et al.
Forskare vid University of Cassino och Southern Lazio, i Italien, har nyligen utvecklat en banbrytande arkitektur som möjliggör drift av en hjälprobot via ett P300-baserat hjärndatorgränssnitt (BCI). Denna arkitektur, presenterad i ett papper som för publicerats på arXiv, kan äntligen tillåta personer med allvarliga rörelsehinder att utföra manipulationsuppgifter, vilket förenklar deras liv.
Systemet som utvecklats av forskarna är baserat på en lätt robotmanipulator. Väsentligen, denna manipulator tar emot kommandon på hög nivå från användare via ett BCI baserat på P300-paradigmet. Inom neurovetenskap, P300-vågor är svar som framkallas av en människas hjärna under beslutsprocessen.
"Huvudsyftet med vårt arbete var att realisera ett system som tillåter användare att generera högnivådirektiv för robotmanipulatorer genom hjärnans datorgränssnitt (BCI), "Filippo Arrichiello, en av forskarna som genomförde studien, berättade TechXplore. "Sådana direktiv översätts sedan till rörelsekommandon för robotmanipulatorn som autonomt uppnår den tilldelade uppgiften, samtidigt som användarens säkerhet garanteras. "
Arkitekturen som forskarna utvecklat har tre nyckelkomponenter:en P300 BCI -enhet, en hjälprobot och ett uppfattningssystem. Arrichiello och hans kollegor integrerade dessa tre element i en ROS -miljö, en välkänd mjukvara mellanprogramvara för robotapplikationer.
Arkitekturens första komponent, P300 BCI -enheten, mäter elektrisk aktivitet i hjärnan via elektroencefalografi (EEG). Den översätter sedan dessa hjärnsignaler till kommandon som kan matas till en dator.
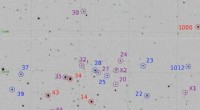
"P300 -paradigmet för BCI använder reaktionen från användarens hjärna på yttre stimuli, dvs blinkande ikoner på en skärm, att låta användaren välja ett element på skärmen genom att reagera (t.ex. genom att räkna) varje gång den önskade ikonen blinkar, "Arrichiello förklarade." Detta gör att användaren kan utföra en uppsättning val bland en uppsättning fördefinierade element och bygga högnivåmeddelanden för roboten om åtgärden som ska utföras, som manipulation av ett objekt. "
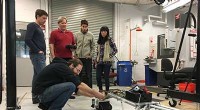
För att utföra de åtgärder som användarna önskar, forskarna använde en lätt robotmanipulator som heter Kinova Jaco. Denna hjälprobots styrprogramvara tar emot högnivådirektiv som genereras av användaren via BCI och översätter dem till rörelsekommandon. Dess rörelse styrs via en sluten invers kinematisk algoritm som samtidigt kan hantera olika uppgifter.

Upphovsman:Arrichiello et al.

Upphovsman:Arrichiello et al.
"Kontrollarkitekturen vi utvecklade gör att roboten kan uppnå flera och prioriterade mål, d.v.s. uppnå manipulationsuppgiften samtidigt som man undviker kollision med användaren och/eller med yttre hinder, och med respekt för begränsningar som robotens mekaniska gränser, "Sa Arrichiello.
Den sista komponenten i arkitekturen som utformats av Arrichiello och hans kollegor är ett uppfattningssystem som är baserat på en RGB-D-sensor (dvs. en Microsoft Kinect One), bland annat. Systemet använder Kinect One -sensorn för att upptäcka och lokalisera objekt som ska manipuleras av roboten inom arbetsytan. Sensorn kan också upptäcka en användares ansikte, uppskatta munnen och känna igen hinder.
"De praktiska konsekvenserna av vår studie är ganska okomplicerade och ambitiösa, "Arrichiello sa." Dess slutliga mål är att gå i riktning mot att bygga en pålitlig och effektiv robotuppsättning som äntligen kan hjälpa användare med allvarliga rörelsehinder att utföra dagliga operationer autonomt och utan ständigt stöd från en vårdgivare. "
När forskarna började arbeta med att utveckla en hjälprobot som drivs av ett BCI, de experimenterade först med ett system som består av en enda manipulator med fast bas som känner igen objekt genom markörer och med ett förkonfigurerat användargränssnitt. De har nu avancerat denna arkitektur avsevärt, till den grad att det tillåter användare att hantera mer komplexa robotsystem, till exempel mobila robotar med dubbla armar.

Upphovsman:Arrichiello et al.

Upphovsman:Arrichiello et al.
"Vi har också förbättrat uppfattningsmodulen, som nu kan känna igen och lokalisera objekt baserat på deras former, "Förklarade Arrichiello." Slutligen, vi arbetade med interaktionen mellan perception -modulen och det grafiska användargränssnittet (GUI) för att skapa GUI -dynamik i enlighet med perception -modulens detekteringar (t.ex. användargränssnittet uppdateras på grundval av antalet och typen av objekt som känns igen på ett bord av perceptionsmodulen). "
För att utvärdera prestandan och effektiviteten av deras arkitektur, Arrichiello och hans kollegor genomförde en serie preliminära experiment, uppnå mycket lovande resultat. I framtiden, deras system kan förändra livet för individer som drabbas av rörelsehinder och fysiska skador, så att de kan slutföra en mängd olika manipulationsuppgifter.
"Framtida forskning kommer för det första att syfta till att förbättra arkitekturens robusthet och tillförlitlighet, utöver att öka systemets applikationsdomän, "Sa Arrichiello." Dessutom, vi kommer att testa olika BCI -paradigmer, dvs. ett annat sätt att använda BCI som de som bygger på motoriska bilder, för att identifiera den mest lämpliga för teleoperationsapplikationer, där användaren kan styra roboten med BCI som en slags joystick, utan att begränsa rörelsekommandot som kan överlåtas till robotarna till en fördefinierad uppsättning. "
© 2019 Science X Network