Upphovsman:Andreas Dekiert / C2Land
Automatiska landningar har länge varit standardprocedur för kommersiella flygplan. Även om större flygplatser har den infrastruktur som krävs för att säkerställa en säker navigering av flygplanet, detta är vanligtvis inte fallet på mindre flygplatser. Forskare vid tekniska universitetet i München (TUM) och TU Braunschweig har nu visat en helt automatisk landning med synassisterad navigering som fungerar korrekt utan behov av markbaserade system.
På stora flygplatser gör Instrument Landing System (ILS) det möjligt för kommersiella flygplan att landa automatiskt med stor precision. Antenner skickar radiosignaler till autopiloten för att säkerställa att den navigerar till banan på ett säkert sätt. För närvarande utvecklas också rutiner som kommer att möjliggöra automatisk landning baserad på satellitnavigering. Även här krävs ett markbaserat förstärkningssystem.
Dock, system som dessa är inte tillgängliga för allmänflyg på mindre flygplatser, vilket är ett problem vid dålig sikt — då kan flygplan helt enkelt inte flyga. "Automatisk landning är viktigt, särskilt i samband med luftfartens framtida roll, säger Martin Kügler, forskarassistent vid TUM Chair of Flight System Dynamics. Det gäller till exempel vid automatiserade flygtransporter av gods och givetvis när passagerare använder automatiserade flygande taxibilar.
Kamerabaserat optiskt referenssystem
I projektet "C2Land, "stödd av den tyska federala regeringen, TUM-forskare har samarbetat med Technische Universität Braunschweig för att utveckla ett landningssystem som låter mindre flygplan landa utan hjälp från markbaserade system.

Kredit:TU Braunschweig
Autopiloten använder GPS-signaler för att navigera. Problemet:GPS-signaler är känsliga för mätfel, till exempel på grund av atmosfäriska störningar. GPS-mottagaren i flygplanet kan inte alltid på ett tillförlitligt sätt upptäcka sådana störningar. Som ett resultat, nuvarande GPS-inflygningsprocedurer kräver att piloterna tar över kontrollen på en höjd av inte mindre än 60 meter och landar flygplanet manuellt.
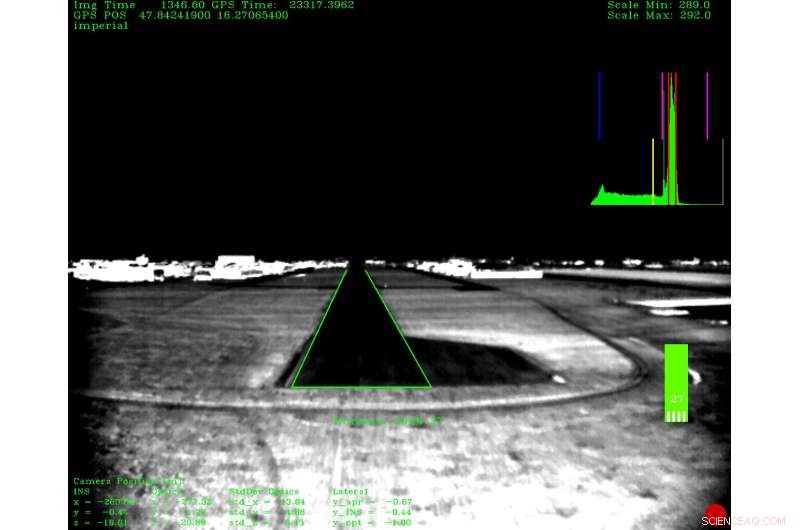
För att göra helt automatiserade landningar möjliga, TU Braunschweig-teamet designade ett optiskt referenssystem:En kamera i det normala synliga området och en infraröd kamera som även kan ge data under förhållanden med dålig sikt. Forskarna utvecklade skräddarsydd bildbehandlingsprogramvara som låter systemet avgöra var flygplanet befinner sig i förhållande till banan baserat på kameradata som det tar emot.
TUM forskningsflygplan har Fly-by-Wire-system
TUM-teamet utvecklade hela det automatiska styrsystemet för TUM:s egna forskningsflygplan, en modifierad Diamond DA42. Flygplanet är utrustat med ett Fly-by-Wire-system som möjliggör kontroll med hjälp av en avancerad autopilot, också utvecklad av TUM-forskarna.
Kredit:TU Braunschweig
För att möjliggöra automatiska landningar, ytterligare funktioner integrerades i programvaran, t.ex. jämförelse av data från kamerorna med GPS -signaler, beräkning av virtuell glidbana för landningsinflygningen samt flygkontroll för olika faser av inflygningen.
Lyckad landning i Wiener-Neustadt
I slutet av maj kunde teamet titta på när forskningsflygplanet landade helt automatiskt vid Diamond Aircraft -flygfältet. Testpiloten Thomas Wimmer är helt övertygad av landningssystemet:"Kamerorna känner redan av banan på stort avstånd från flygplatsen. Systemet leder sedan flygplanet genom landningsinflygningen helt automatiskt och landar det exakt på banans mittlinje ."