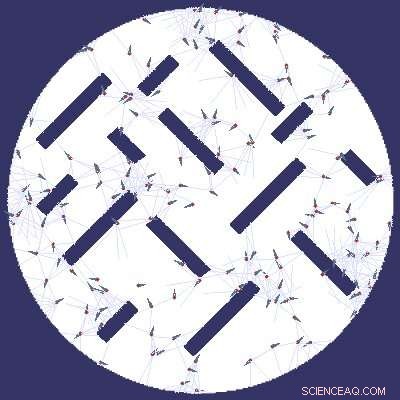
En av de tre övervägda lärmiljöerna, nämligen förflyttning. I rörelse, agenter lär sig att navigera i miljön och undviker hinder (mörka rektanglar) och andra agenter. Kredit:Amine Boumaza.
Rekombination, omarrangemang av genetiskt material till följd av parning eller kombination av DNA-segment från olika organismer, har många evolutionära fördelar. Till exempel, det tillåter organismer att ta bort skadliga mutationer från sina genom och ta på sig mer användbara mutationer.
Amine Boumaza, en forskare vid Université de Lorraine, har nyligen försökt att tillämpa denna process på onlineförkroppslig evolutionär robotik, ett område inom robotik som fokuserar på att replikera evolutionsteorier i robotar. I sin tidning, publicerad i tidskriften GECCO '19 Proceedings of the Genetic and Evolutionary Computation Conference, han utvecklade en rekombinationsoperatör inspirerad av evolutionen och tränade den i tre uppgifter som kräver samarbete mellan flera robotar.
"Min forskning faller inom det bredare ämnet AI, och mer specifikt, förstå hur vi kan designa agenter som kan lära sig att utföra intressanta uppgifter, Boumaza sa. "Detta forskningsämne är inte nytt, men ganska gammal, och det fick mycket uppmärksamhet på sistone på grund av de imponerande resultaten av djupinlärning. I mitt fall, Jag är mer intresserad av svärmrobotik, där målet är att få ett stort antal små robotar att samarbeta för att lösa en uppgift och anpassa sig till förändringar i sin miljö."
Fascinerad av de evolutionära strategierna, särskilt rekombination, som bättre utrustar levande organismer för att möta livets utmaningar, Boumaza försökte undersöka om liknande mekanismer skulle kunna tillämpas på robotteknik. Hans hypotes var att om man lyckades replikera i robotar, rekombination skulle öka deras prestanda och effektivitet.
"När vi pratar om robotagenter, vi antar i allmänhet en fysisk enhet som är förkroppsligad i en miljö (t.ex. en dammsugningsrobot i ett rum), Boumaza sa. "Denna agent uppfattar sin omgivning med hjälp av en uppsättning sensorer (hindersensorer, kamera, etc.), vilket kan ge den någon form av representation av sin omgivning. Medlet kan också verka i miljön med hjälp av effektorer (motorer, vapen, rengöringsborste, etc.). Dessa åtgärder är resultatet av en beräkning som är resultatet av vad vi vanligtvis kallar en styrenhet (dvs. något slags beslutsprogram)."

En av de tre övervägda lärmiljöerna, nämligen föremålssamling. I föremålssamlingen, agenter måste samla in så mycket föremål (röda prickar) som möjligt. Kredit:Amine Boumaza.
En styrenhet är i huvudsak ett program som bearbetar de uppfattningar som en robot förvärvar via dess sensorer och matar ut kommandon till dess effektorer. När det gäller en robotdammsugare, till exempel, en personuppgiftsansvarig skulle behandla information om sin omgivning, upptäcka om det finns damm framför den, producerar sedan utsignaler som får roboten att aktivera vakuumet och avancera för att dammet suga upp.
"Ta ett ytterligare steg, vi kan också överväga flera agenter som kan utvecklas i samma miljö, Boumaza sa. "Att designa kontroller för varje agent i sådana inställningar är ett mycket svårt problem som det inte finns någon effektiv teknik för ännu. I detta fall, vi kan ha få (t.ex. 10 till 100) komplexa robotar, eller många mycket enkla robotar (t.ex. hundratals) som interagerar på sätt som vanligtvis är inspirerade av insekters beteende; det är vad vi kallar svärmrobotik."
När man utvecklar en robot som effektivt kan utföra en viss uppgift, forskare behöver designa en styrenhet som är skräddarsydd för den specifika uppgiften. Om miljön som roboten är tänkt att fungera i är enkel, att designa den här kontrollern kan vara ganska lätt, ändå oftast, så är inte fallet.
Detta blir ännu svårare, om inte omöjligt, när man överväger flera robotar som interagerar i en given miljö. Den främsta anledningen till detta är att en mänsklig utvecklare omöjligt kan förutsäga alla situationer som varje robot kommer att stöta på, samt de mest effektiva åtgärderna för att hantera var och en av dessa situationer. Lyckligtvis, de senaste åren, framsteg inom maskininlärning har öppnat intressanta nya möjligheter för robotforskning, tillåter utvecklare att införliva verktyg som möjliggör kontinuerligt lärande, i huvudsak träna kontrollanten att hantera många situationer över tiden.
"Ett sätt att designa en kontroller på ett sådant sätt är att använda evolutionära algoritmer, som, löst sagt, försök att efterlikna arternas naturliga utveckling för att utveckla robotagentkontroller, " sa Boumaza. "Det är en iterativ process där, när djuren blir bättre anpassade till sin miljö, regulatorn blir bättre på att lösa en uppgift. Målet är inte att simulera naturlig evolution, men ta hellre lite inspiration från det."
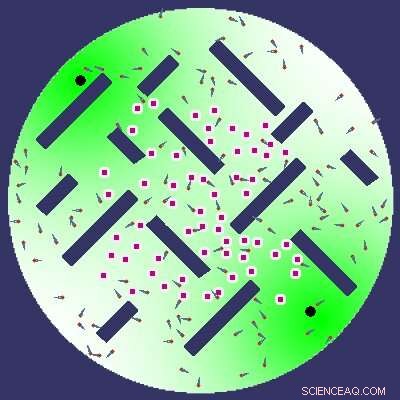
En av de tre övervägda lärmiljöerna, nämligen födosök. I födosök agenter måste samla föremål och bära dem tillbaka till boet (en av de två svarta cirklarna). Det grönfärgade golvet är ett feromonspår som ger en känsla av riktning, den är mycket koncentrerad vid boplatserna och mindre koncentrerad längre bort. Kredit:Amine Boumaza.
Evolutionär robotik är bara en av många tekniker som forskare kan använda för att designa robotstyrenheter. På senare år har dock, evolutionära tillvägagångssätt har vunnit popularitet, med ett växande antal studier som syftar till att replikera evolutionära strategier som observerats hos djur och människor.
"Evolutionär robotik har vissa fördelar, som att vi inte behöver specificera hur vi ska lösa uppgiften (den upptäcks/lärs in av algoritmen), men behöver bara specificera ett sätt att mäta hur väl uppgiften utförs, " sa Boumaza. Det har också några nackdelar, eftersom det är en mycket långsam och beräkningsintensiv process, som kan vara mycket svårt att utföra på riktiga robotar. Dessutom, dessa tillvägagångssätt är vanligtvis mycket känsliga för resultatmått, eftersom de villkorar beteendet som agenterna lärt sig."
Boumaza, liksom andra forskare inom området, har försökt utveckla nya tillvägagångssätt för att övervinna bristerna i befintliga evolutionära robottekniker. I sin senaste studie, han föreslog specifikt användningen av en ny "parningsoperator" inspirerad av rekombination, som kan förbättra konvergenshastigheten i robotsimuleringar. Detta är en anmärkningsvärd prestation, eftersom det i slutändan kan minska den tid som krävs för att överföra ett tillvägagångssätt från simuleringar till riktiga robotar.
Han tillämpade sin rekombinationsoperatör på tre kollektiva robotuppgifter:förflyttning, föremålsinsamling och föremålsfödosök. Han jämförde sedan prestandan som uppnåddes med en rent mutativ version av hans algoritm med den för olika rekombinationsoperatorer. Resultaten som samlats in i hans experiment tyder på att, när den är korrekt utformad, rekombinationsstrategier kan faktiskt förbättra anpassningen av en svärm av robotar i alla de uppgifter han övervägde.
I framtiden, den nya evolutionära robottekniken som han föreslog skulle kunna användas för att förbättra prestanda och anpassningsförmåga hos robotar i uppgifter som kräver samarbete mellan flera agenter. Sålänge, dock, Boumaza planerar att testa sin algoritm på nya uppgifter, för att avgöra om den förbättring han observerade i de tre uppgifter han fokuserade på fortfarande håller.
"Det skulle också vara intressant att kolla om mitt tillvägagångssätt kan implementeras på riktiga robotar, "Sa Boumaza. "Teoretiskt sett hindrar ingenting det, förutom att ha ett stort antal fysiska robotar och acceptera att hantera "verklighetsklyftan" (dvs det vi ser i simulering är vanligtvis inte vad som skulle hända i verkligheten, på grund av simuleringsförenklingarna. Svärmrobotik handlar om siffror och en enskild robots misslyckanden bör inte hindra svärmen. I sista hand, därför, för att fastställa giltigheten av detta tillvägagångssätt måste det testas i verkligheten, på fysiska robotar."
© 2019 Science X Network