Kredit:Li et al.
På senare år har ett växande antal forskare har utforskat användningen av robotarmar eller fingerfärdiga händer för att lösa en mängd olika vardagliga uppgifter. Även om många av dem har lyckats hantera enkla uppgifter, såsom grepp eller grundläggande manipulation, komplexa uppgifter som involverar flera steg och exakta/strategiska rörelser har hittills visat sig svårare att ta itu med.
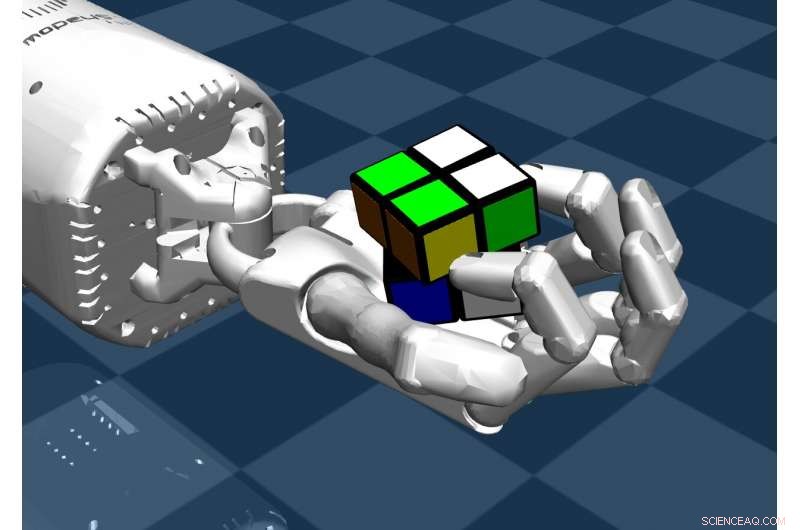
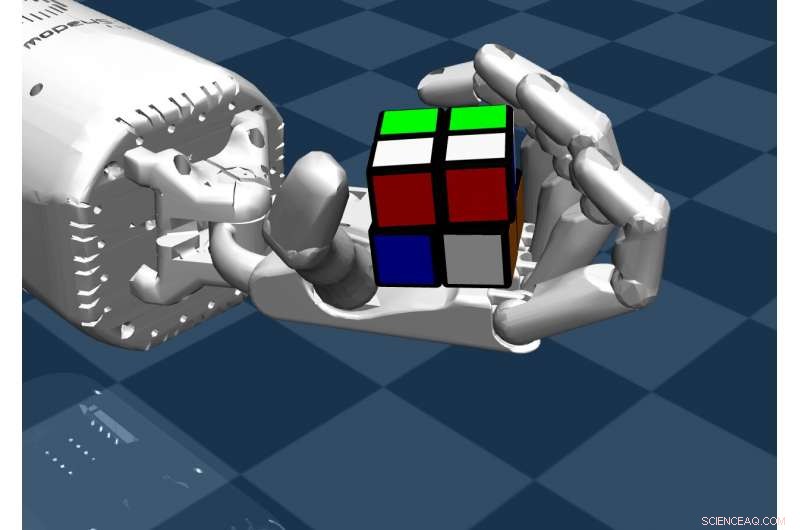
Ett team av forskare vid det kinesiska universitetet i Hong Kong och Tencent AI Lab har nyligen utvecklat en djupinlärningsbaserad metod för att lösa en Rubiks kub med hjälp av en fingerfärdig hand med flera fingrar. Deras tillvägagångssätt, presenteras i en tidning förpublicerad på arXiv, låter en skicklig hand lösa mer avancerade manipulationsuppgifter, som det berömda Rubik's Cube-pusslet.
En Rubiks kub är en plastkub täckt av flerfärgade rutor som kan flyttas till olika positioner. Målet med pusslet är att strategiskt vrida och vända kubens sektioner tills alla rutor på var och en av dess ytor är av samma färg.
"Att se vissa forskare använda flerfingrade robothänder för uppgifter som att placera ett föremål och manipulera ett verktyg, vi funderade på om vi kunde använda en robothand för mer komplicerade uppgifter, som att lösa en Rubiks kub, "Tingguang Li, en av forskarna som genomförde studien, berättade för TechXplore.
För att ta itu med Rubik's Cube-pusslet med en skicklig hand, Li och hans kollegor utvecklade en hierarkisk modell för inlärning av djup förstärkning som i huvudsak delar upp uppgiften i ett planerings- och ett manipulationsskede. I deras studie, forskarna tillämpade detta tillvägagångssätt på en femfingrad fingerfärdig hand som kallas Shadow Hand.
"Utmaningarna med att lösa en Rubiks kub med en robothand är tvåfaldiga:För det första, att styra en robothand är mycket svårt eftersom den har en hög grad av frihet; andra, att lösa en Rubiks kub kräver en lång rörelsesekvens, " Li förklarade. "Vår idé kombinerar en djup förstärkningsinlärningsalgoritm, som har många framgångsrika applikationer, och mänsklig kunskap. Målet är att visa en robothands skicklighet och lösa en slumpmässigt förvrängd Rubiks kub med en hög framgångsfrekvens.
Den hierarkiska modell som föreslås av forskarna har två nyckelkomponenter:en för planering och en för manipulation. Initialt, planeringskomponenten (dvs. en modellbaserad kublösare) identifierar den optimala lägessekvensen för att lösa pusslet. Sedan, manipulationskontrollenheten (dvs. en modellfri kuboperatör) styr den skickliga handens fingrar för att utföra dessa steg.
"Vårt tillvägagångssätt har två lager:det högre lagret planerar en bana för att lösa en Rubiks kub som är sammansatt av atomära åtgärder, och det nedre lagret lär sig att implementera varje atomär handling, " Sa Li. "De atomära åtgärderna lärs in via djup förstärkningsinlärningsmodell, bli av med att manuellt designa komplicerade lågnivåkontroller."
Forskarna tränade och utvärderade sin modell med hjälp av en högfientlig simulator, som de också byggde. De testade sin modells prestanda i en serie experiment där den virtuella skickliga handen matades med 1400 slumpmässigt förvrängda Rubiks kuber och fann att den uppnådde en genomsnittlig framgångsfrekvens på 90,3 procent.
"Vi visade att den flerfingrade robothanden har en enorm potential för komplicerade uppgifter, ", sa Li. "Integration av inlärningsbaserade algoritmer kan bidra till att minska det tunga arbetet med att manuellt utforma kontrollalgoritmer. Jag hoppas att detta kommer att locka fler forskare till detta område och uppmuntra dem att utveckla nya metoder för att ytterligare öka fingerfärdigheten hos robothänder."
Kredit:Li et al.

Kredit:Li et al.
Kredit:Li et al.
I motsats till tidigare föreslagna metoder, modellen som utvecklats av Li och hans kollegor möjliggör slutförandet av en mer komplex manipulationsuppgift med en skicklig hand, specifikt lösa en Rubiks kub. Än så länge, forskarna har bara utvärderat deras tillvägagångssätt i simuleringar, men de planerar nu att tillämpa sin algoritm på en riktig robothand.
© 2019 Science X Network