Roboten som användes i detta experiment var en Minitaur-maskin med ben. Kredit:Georgia Tech / Neveln
Ej, en kackerlacka! Men den drar av innan smutsen dyker upp. Nu, forskare har utnyttjat buggens fantastiska skicklighet för att skapa en smart enkel metod för att bedöma och förbättra förflyttning i robotar.
I vanliga fall, tråkig modellering av mekanik, elektronik, och informationsvetenskap krävs för att förstå hur insekters eller robotars rörliga delar koordinerar smidigt för att ta dem plats. Men i en ny studie, biomekanikforskare vid Georgia Institute of Technology kokade ner sprintarna av kackerlackor till praktiska principer och ekvationer som de sedan använde för att få en testrobot att gå runt bättre.
Metoden berättade för forskarna om hur varje ben fungerar för sig, hur de alla möts som en helhet, och harmonin eller bristen därav i hur de gör det. Trots buggars och bots fullständigt divergerande rörelsedynamik, den nya metoden fungerade för båda och borde fungera för andra robotar och djur, för.
Den biologiska roboten, mörten, var den vida överlägsna löparen med neurologiska signaler som styrde sex oklanderligt utvecklade ben. Den mekaniska roboten, en konsumentmodell, hade fyra stubbiga ben och inget nervsystem utan förlitade sig istället för rörelsekontroll på grova fysiska krafter som färdades genom dess chassi som grova signaler för att grovt samordna sin klumpiga gång.
"Roboten var mycket skrymmande och kunde knappt känna av sin omgivning. Kackerlackan hade många sinnen och kan anpassa sig bättre till ojämn terräng. Gupp så höga som dess höfter skulle inte sakta ner den alls, sade Izaak Neveln, studiens första författare, som var postdoktor i Simon Sponbergs labb vid Georgia Tech under studien.
Avancerad enkelhet
Metoden, eller "mäta, "som studien kallar det, överträffade dessa enorma skillnader, som genomsyrar djurinspirerad robotik.
"Mådet är generellt (universellt) i den meningen att det kan användas oavsett om signalerna är neurala spikmönster, kinematik, spänningar eller krafter och inte beror på det särskilda förhållandet mellan signalerna, ", skrev studiens författare.
Oavsett hur en bugg eller en bot fungerar, måttets matematiska in- och utdata är alltid i samma enheter. Åtgärden kommer inte alltid att eliminera behovet av modellering, men det står för att förkorta och vägleda modellering och avvärja plågsamma misstag.
Författarna publicerade studien i tidskriften Naturkommunikation i augusti 2019. Forskningen finansierades av National Science Foundation. Sponberg är biträdande professor vid Georgia Techs School of Physics och School of Biological Sciences.
Svängningarna på kackerlackans ben kan plottas på liknande sätt som en pendels svängningar till sinusvågor. Dessa leder till bättre matematisk förståelse av insektens rörelse. Kredit:Georgia Tech / Sponberg / Neveln
Centralisering vs decentralisering
Ofta skickar en bot eller ett djur många gångsignaler genom ett centralt system för att harmonisera förflyttning, men alla signaler är inte centraliserade. Även hos människor, även om förflyttning starkt beror på signaler från centrala nervsystemet, vissa neurala signaler är begränsade till delar av kroppen; de är lokaliserade signaler.
Vissa insekter tycks röra sig med lite centralisering—som stick buggar, även känd som promenadkäppar, vars ben rör sig nästan självständigt. Stick buggar är knasiga löpare.
"Tanken har varit att stick buggar har den mer lokaliserade kontrollen av rörelse, medan en kackerlacka går väldigt fort och behöver bibehålla stabilitet, och dess rörelsekontroll är förmodligen mer centraliserad, mer klockliknande, sa Neveln.
Stark centralisering av signaler koordinerar generellt rörelsen bättre. Det kan vara kod som färdas genom en komplicerad robots ledningar, en kackerlackas centrala nervceller synkroniserar dess ben, eller den klumpiga robotens chassi som lutar bort från ett ben som dunkar mot marken och lägger vikt på ett motsatt ben. Robotister måste se igenom skillnaderna och ta reda på samspelet mellan en lokomotors lokala och centrala signaler.
Cool fysik
Det nya "måttet" gör detta genom att fokusera på ett övergripande fenomen i gåbenen, vilket kan ses som en pendula som rör sig fram och tillbaka. För stor rörelse, de måste synka upp i det som kallas faskopplingssvängningar.
En rolig, lätt experiment illustrerar denna fysikprincip. Om några, säg sex, metronomer – tickande rytmpendlar som pianolärare använder – svänger ur synk, och du placerar dem alla på en plattform som fritt svajar tillsammans med metronomernas svängningar, gungorna synkroniseras unisont.
Faserna, eller vägbeskrivningar, av deras svängningar kopplas ihop med varandra genom att centralisera deras sammansatta mekaniska impulser genom plattformen. Detta speciella exempel på faskoppling är mekanisk, men det kan också vara beräkningsmässigt eller neurologiskt – som i mörten.
Dess ben skulle vara analoga med de svängande metronomerna, och central neuromuskulär aktivitet analog med den fritt svängande plattformen. I mörten, inte alla sex ben svänger åt samma håll.
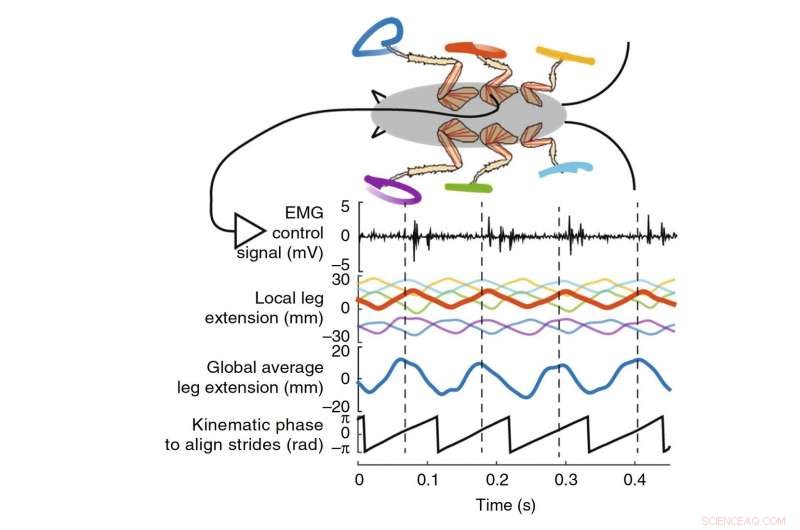
"Deras synkronisering är inte enhetlig. Tre ben är synkroniserade i fas med varandra - de främre och bakre benen på ena sidan med mittbenet på den andra sidan - och de tre är synkroniserade ur fas med de andra tre, " sa Neveln. "Det är en omväxlande stativgång. Ett stativ med tre ben växlar med det andra stativet med tre ben."
Onödigt tjafs
Och precis som pendula, varje bens svängningar kan ritas som en våg. Alla benens vågor kan beräknas i medeltal till en övergripande mörtsurry-våg och sedan utvecklas till mer användbar matematik som kopplar samman centralisering med decentralisering och faktorer som entropi som kan kasta bort rörelsekontrollen.
De resulterande principerna och matematiken gynnade den klumpiga roboten, som har starka decentraliserade signaler i sina benmotorer som reagerar på benkontakt med marken, och centraliserad kontroll svagare än stick-buggens. Forskarna ritade ut robotens rörelser, för, men de resulterade inte i den snyggt synkroniserade grupp vågor som kackerlackan hade.
Forskarna vände sig med principerna och matematiken till den klumpiga roboten, som till en början var ur sin sort – att trampa eller hoppa onödigt som en pogopinne. Sedan stärkte forskarna den centraliserade kontrollen genom att vikta om dess chassi för att få det att röra sig mer sammanhängande.
"Metronomerna på plattformen är mekaniska kopplingar, och vår robot koordinerar kontrollen på det sättet, ", sa Neveln. "Du kan ändra den mekaniska kopplingen av roboten genom att flytta om dess vikter. Vi kunde förutsäga de förändringar som detta skulle göra genom att använda det mått som vi utvecklade från kackerlackan."
Kackerlacka överraskar
Forskarna kopplade också upp specifika mörtmuskler och neuroner för att observera deras synkoperingar med skurrvågorna. Sjutton kackerlackor tog 2, 982 steg för att informera om principerna och matematiken, och insekterna skapade också överraskningar på forskarna.
En stack ut:Forskarna trodde att signalering centraliserades mer när mörten tog fart, men istället, både central och lokal signalering förstärkt, kanske fördubblar budskapet:Kör!