Upphovsman:Ecole Polytechnique Federale de Lausanne
EPFL -forskare utvecklar nya tillvägagångssätt för förbättrad kontroll av robothänder - särskilt för amputerade - som kombinerar individuell fingerkontroll och automatisering för förbättrad grepp och manipulation. Detta tvärvetenskapliga bevis på konceptet mellan neuroteknik och robotik testades framgångsrikt på tre amputerade och sju friska försökspersoner. Resultaten publiceras i dagens nummer av Nature Machine Intelligence .
Tekniken slår samman två koncept från två olika områden. Att implementera dem båda tillsammans hade aldrig gjorts tidigare för robotisk handkontroll, och bidrar till det framväxande området för delad kontroll inom neuroprostetik.
Ett koncept, från neuroteknik, innefattar att dechiffrera avsedd fingerrörelse från muskelaktivitet på amputerad stubbe för individuell fingerkontroll av proteshanden som aldrig tidigare har gjorts. Den andra, från robotik, låter den robotiska handen hjälpa till att ta tag i föremål och behålla kontakten med dem för robust grepp.
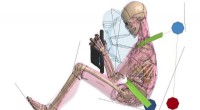
"När du håller ett föremål i handen, och det börjar glida, du har bara ett par millisekunder att reagera, "förklarar Aude Billard som leder EPFL:s inlärningsalgoritmer och systemlaboratorium." Robothanden har förmågan att reagera inom 400 millisekunder. Utrustad med trycksensorer längs fingrarna, den kan reagera och stabilisera objektet innan hjärnan faktiskt kan uppfatta att objektet glider. "
Hur delad kontroll fungerar
Algoritmen lär sig först hur man avkodar användarens avsikt och översätter detta till fingerrörelse av den protetiska handen. Amputaten måste utföra en serie handrörelser för att träna algoritmen som använder maskininlärning. Sensorer placerade på amputerad stubbe upptäcker muskelaktivitet, och algoritmen lär sig vilka handrörelser som motsvarar vilka mönster av muskelaktivitet. När användarens avsedda fingerrörelser har förståtts, denna information kan användas för att styra enskilda fingrar på den protetiska handen.
"Eftersom muskelsignaler kan vara bullriga, vi behöver en maskininlärningsalgoritm som extraherar meningsfull aktivitet från dessa muskler och tolkar dem till rörelser, "säger Katie Zhuang första författare till publikationen.
Nästa, forskarna konstruerade algoritmen så att robotautomatisering startar när användaren försöker greppa ett objekt. Algoritmen säger till proteshanden att stänga fingrarna när ett föremål är i kontakt med sensorer på ytan av den protetiska handen. Detta automatiska grepp är en anpassning från en tidigare studie för robotarmar utformade för att härleda formen på föremål och greppa dem baserat på enbart taktil information, utan hjälp av visuella signaler.

Upphovsman:Ecole Polytechnique Federale de Lausanne

Upphovsman:Ecole Polytechnique Federale de Lausanne
Många utmaningar återstår att konstruera algoritmen innan den kan implementeras i en kommersiellt tillgänglig proteshand för amputerade. Tills vidare, algoritmen testas fortfarande på en robot från en extern part.
"Vårt gemensamma tillvägagångssätt för att styra robotiska händer kan användas i flera neuroprostetiska applikationer, såsom bioniska handproteser och hjärna-till-maskin-gränssnitt, öka den kliniska effekten och användbarheten av dessa enheter, "Silvestro Micera, EPFL:s Bertarelli Foundation -ordförande i translationell neuroingenjör, och professor i bioelektronik vid Scuola Superiore Sant "Anna.