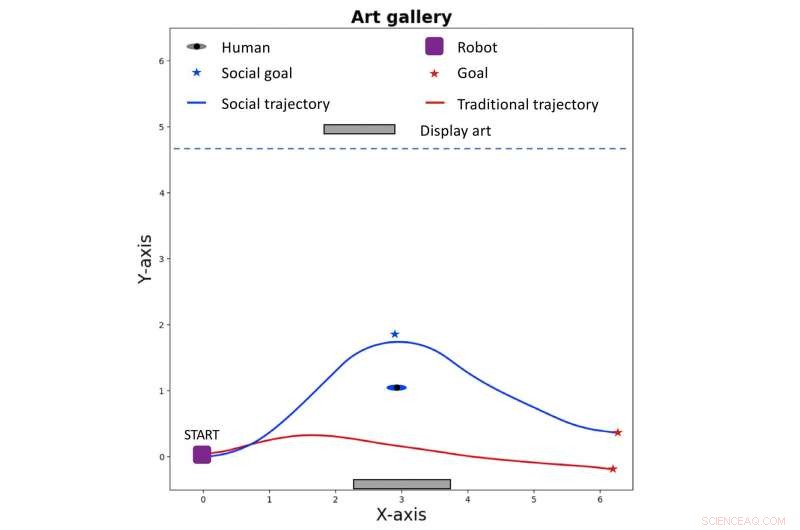
En mobil robot som tar hänsyn till aktivitetsutrymme i ett konstgalleri där roboten med SAN -planerare undviker att gå in i aktivitetsutrymmet, representerad av den blå banan. Upphovsman:Banisetty et al.
Mobilrobotar tar sig gradvis in i ett antal människor befolkade, inklusive sjukhus, köpcentra och människors hem. För att dessa robotar ska interagera med människor i sin omgivning, de bör respektera ett antal outtalade sociala normer som är förknippade med att dela en given miljö med andra.
Med detta i åtanke, forskare vid University of Nevada, Reno har nyligen utvecklat en icke-linjär, multimålsoptimeringsmetod som kan möjliggöra socialt medveten navigering i mobila robotar. Detta tillvägagångssätt, först skisserat i en uppsats som presenterades vid 2018 International Conference on Robots and Systems (IROS) och nu publicerad på arXiv, säkerställer att robotar inte invaderar människors personliga utrymme i sin omgivning, samtidigt som det möjliggör mer effektiva mänskliga-robot-interaktioner (HRI) i flera scenarier.
"Denna forskning började inledningsvis som en del av mitt avhandlingsarbete med robotar och barn, "David Feil-Seifer, en av forskarna som genomförde studien, berättade TechXplore. "Tidigare arbete innebar att utveckla en robot för miljöer där vi ville att en robot skulle interagera med barn. I det här fallet, vi fick roboten att ta den mest "effektiva" vägen med de mätvärden som vanligtvis används i robotvägsplanering (minimera tiden för en rörelse, minimera avståndet, träffar ingenting). "
I en tidigare studie publicerad i Journal of Human-Robot Interaction , Feil-Seifer och hans kollegor försökte utveckla robotnavigeringsbeteenden för miljöer som befolkas av barn. Pilotarbete visade att roboten var effektiv för att nå sin önskade plats utan att träffa någonting, men forskarna observerade att barnen vanligtvis reagerade dåligt på roboten.
Faktiskt, roboten som används i deras experiment skulle i allmänhet vända sig bort från barn och gå så snabbt som möjligt mot sin önskade plats. Som en konsekvens av detta beteende, barnen trodde att roboten inte ville interagera med dem.
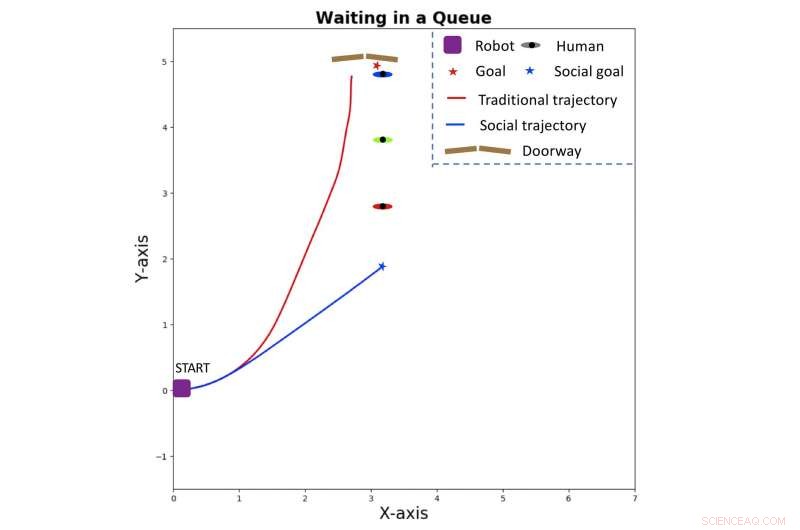
En mobil robot går med i en cue, bildas framför ett dörröppningsscenario. Den traditionella planeraren genererade den röda banan, att styra roboten till en plats bredvid den första personen (olämpligt), klippa linan. Den blå banan, vårt föreslagna tillvägagångssätt, leda roboten att ansluta sig till linjen (lämpligt). Upphovsman:Banisetty et al.
"Vi observerade roboten och såg att den inte riktigt rörde sig som en person gör, ta in social information och använda den för att hjälpa till med dess vägplanering, "Feil-Seifer sa." Vi bestämde oss därför för att göra en navigationsplanerare som kan använda social distansinformation för att utföra socialt lämpliga rörelser. "
I samma tidigare studie, Feil-Seifer och hans kollegor tillät roboten framgångsrikt att avgöra om en planerad rörelse var socialt lämplig med en enkel matematisk metod som kallas Gaussian blandningsmodeller (GMM). Denna metod fungerade bra i situationer där sociala faktorer lätt kunde förstås och representeras med hjälp av en enkel linjär matematisk modell.
Eftersom de flesta verkliga sociala interaktioner involverar flera faktorer som är svåra att passa in i en linjär modell, dock, den enkla metoden som de utvecklade skulle inte generaliseras väl i olika sociala situationer, och i många fall det skulle inte fungera alls. I deras nya studie, forskarna bestämde sig därför för att uppdatera den planerare som de tidigare utvecklat för att optimera robotens planerade rörelser, redogör för de icke-linjära relationerna mellan de olika sociala egenskaperna som de ville att roboten skulle överväga. Detta innebar att man använde en Pareto concavity elimination transformation (PaCcET) -aktiverad planerare.
"De viktigaste fördelarna med vårt tillvägagångssätt är att det kan ta dessa olinjära relationer mellan de olika sociala faktorerna (dvs. där du är i en korridor, där du är i förhållande till andra människor, hur nära du är ditt mål, etc.) beaktas, "Sa Feil-Seifer.
Feil-Seifer och hans kollegor tillämpade sin icke-linjära optimeringsmetod på flera scenarier där en robot måste respektera sociala normer, till exempel, genom att inte invadera människors personliga utrymme. De fann att deras tillvägagångssätt fungerade bra i många av dessa scenarier, inklusive interaktioner i en hall, i ett konstgalleri eller medan du väntar i en kö.
"Vi har ännu inte gjort en direkt jämförelse med andra socialt medvetna navigationsplanerare; det är planerat för framtiden, "Sa Feil-Seifer." Men jämfört med en traditionell planerare som inte tar hänsyn till social dynamik, roboten ger en person mycket mer utrymme när han passerar dem i korridoren, samtidigt som de fortsätter mot ett önskat mål. "
I deras senaste studie, forskarna utvärderade sitt tillvägagångssätt i 2-D-simuleringar på en simulerad PR2-robot och i den verkliga världen på en pionjär-3DX mobil robot. Deras resultat tyder på att deras tillvägagångssätt kan hantera flera interaktionsscenarier som involverar både holonomiska och icke-holonomiska robotar.
"Praktiskt taget, denna första uppsats visar att denna metod kan fungera, åtminstone i en simulerad miljö, "Feil-Seifer sa." Senare arbete har visat detta i den verkliga världen och ett brett spektrum av sociala scenarier som tar hänsyn till både andra människor och faktorer relaterade till robotens miljö (dvs. sevärdheter, t.ex. målningar på en vägg) som också relaterar till att vara socialt medveten. "
Övergripande, arbetet som utförs av Feil-Seifer och hans kollegor belyser behovet av att utveckla verktyg för att göra robotar mer socialt medvetna för att se till att de inte gör människor obekväma och på så sätt underlättar deras integration i samhället. I framtiden, det icke-linjära optimeringssättet som de utvecklat kan i slutändan förenkla antagandet av mobila robotar på kontor, sjukhus och en mängd andra miljöer.
"Vi fortsätter nu att utöka möjligheterna i vår socialt medvetna navigationsplanerare (SAN) till att omfatta ett bredare spektrum av sociala interaktioner för att förstå det sociala sammanhanget bättre så att det kan bestämma vilka mål som ska prioriteras, och för att få systemet att fungera mer robust, "Feil-Seifer sa." Vi planerar också att studera de direkta effekter som socialt medveten navigering har på människor som observerar interaktionen och hur det påverkar deras uppfattning om roboten, eftersom detta skulle hjälpa till att validera nödvändigheten för socialt medveten navigering. "
© 2019 Science X Network