Arméforskare är på uppdrag att förstå värdet av muskelns molekylära "levande" funktionalitet, och den grundläggande mekaniken som skulle behöva replikeras för att på konstgjord väg uppnå de förmågor som härrör från proteinerna som ansvarar för muskelkontraktion. Kredit:US Army-Shutterstock
I ett försök att göra robotar mer effektiva och mångsidiga lagkamrater för soldater i strid, Arméforskare är på uppdrag att förstå värdet av muskelns molekylära levande funktionalitet, och den grundläggande mekaniken som skulle behöva replikeras för att på konstgjord väg uppnå de förmågor som härrör från proteinerna som ansvarar för muskelkontraktion.
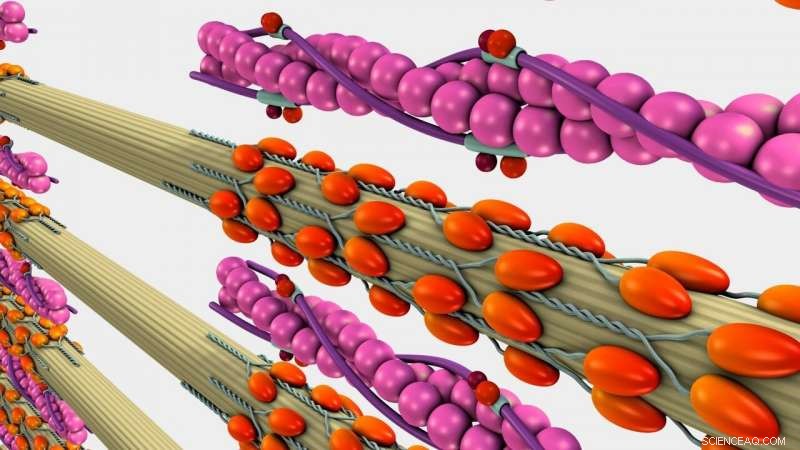
Bionanomotorer, som myosiner som rör sig längs aktinnätverk, är ansvariga för de flesta rörelsemetoder i alla livsformer. Således, utvecklingen av artificiella nanomotorer skulle kunna förändra spelet inom robotforskningsområdet.
Forskare från U.S. Army Combat Capabilities Development Commands Army Research Laboratory har letat efter att identifiera en design som skulle tillåta den artificiella nanomotorn att dra fördel av Brownsk rörelse, partiklarnas egenskap att röra sig upprört bara för att de är varma.
CCDC ARL-forskarna tror att förståelse och utveckling av denna grundläggande mekanik är ett nödvändigt grundläggande steg mot att fatta välgrundade beslut om genomförbarheten av nya riktningar inom robotik som involverar blandning av syntetisk biologi, robotik, och dynamik och styrteknik.
Journal of Biomechanical Engineering nyligen presenterade deras forskning.
"Genom att kontrollera styvheten hos olika geometriska särdrag i en enkel hävarmsdesign, vi fann att vi kunde använda Brownsk rörelse för att göra nanomotorn mer kapabel att nå önskvärda positioner för att skapa linjär rörelse, sa Dean Culver, en forskare vid CCDC ARL:s fordonsteknologidirektorat. "Denna nanoskaliga funktion översätts till mer energieffektivt aktivering i makroskala, vilket betyder robotar som kan göra mer för krigsfightern under en längre tid."
Enligt Culver, beskrivningarna av proteininteraktioner vid muskelkontraktion är vanligtvis på ganska hög nivå. Mer specifikt, snarare än att beskriva krafterna som verkar på ett enskilt protein för att söka dess motsvarighet, föreskrivna eller empiriska hastighetsfunktioner som dikterar de förhållanden under vilka en bindning eller en frisättningshändelse inträffar har använts av forskarvärlden för att replikera denna biomekaniska process.
"Dessa allmänt accepterade muskelkontraktionsmodeller är besläktade med en black-box-förståelse av en bilmotor, " sa Culver. "Mer gas, mer kraft. Den väger så mycket och tar så mycket plats. Förbränning är inblandat. Men, du kan inte designa en bilmotor med den typen av information på ytnivå. Du måste förstå hur kolvarna fungerar, och hur fint injektionen behöver ställas in. Det är en förståelse på komponentnivå av motorn. Vi dyker ner i mekaniken på komponentnivå i det uppbyggda proteinsystemet och visar design- och kontrollvärdet av levande funktionalitet samt en tydligare förståelse av designparametrar som skulle vara nyckeln till att syntetiskt reproducera sådan levande funktionalitet."
Culver uppgav att förmågan för Brownsk rörelse att sparka en bunden partikel från en ofördelaktig elastisk position till en fördelaktig, när det gäller energiproduktion för en molekylär motor, har illustrerats av ARL på en komponentnivå, ett avgörande steg i designen av artificiella nanomotorer som erbjuder samma prestanda som biologiska.
"Denna forskning lägger till en viktig pusselbit för snabba, mångsidiga robotar som kan utföra autonoma taktiska manöver- och spaningsfunktioner, ", sa Culver. "Dessa modeller kommer att vara integrerade i designen av distribuerade ställdon som är tysta, låg termisk signatur och effektiva funktioner som kommer att göra dessa robotar mer slagkraftiga i fält."
Culver noterade att de är tysta eftersom musklerna inte gör så mycket ljud när de aktiveras, speciellt jämfört med motorer eller servon, kallt eftersom mängden värme som genereras i en muskel är mycket mindre än en jämförbar motor, och effektiv på grund av fördelarna med den distribuerade kemiska energimodellen och potentiell flykt via Brownsk rörelse.
Enligt Culver, bredden av applikationer för manöverdon inspirerade av biomolekylära maskiner i djurmuskler är fortfarande okänd, men många av de befintliga applikationsutrymmena har tydliga arméapplikationer som bioinspirerad robotik, nanomaskiner och energiskörd.
"Fundamental och undersökande forskning inom detta område är därför en klok investering för vår framtida krigsfighterkapacitet, sa Culver.
Går vidare, det finns två primära förlängningar av denna forskning.
"Först, vi måste bättre förstå hur molekyler, som den bundna partikeln som diskuteras i vår tidning, interagerar med varandra i mer komplicerade miljöer, " sa Culver. "I tidningen, vi ser hur en bunden partikel med fördel kan utnyttja Brownsk rörelse för att gynna muskelkontraktionen totalt sett, men partikeln i denna första modell befinner sig i en idealiserad miljö. I våra kroppar, den är nedsänkt i en vätska som bär många olika joner och energibärande molekyler i lösning. Det är den sista pusselbiten för enmotorn, modeller av molekylära motorer i nanoskala."
Den andra förlängningen, sa Culver, är att upprepa denna studie med en fullständig 3D-modell, banar väg för uppskalning till praktisk design.
Anmärkningsvärt är också det faktum att eftersom denna forskning är så ung, ARL-forskare använde detta projekt för att etablera relationer med andra forskare i det akademiska samhället.
"Att stödja sig på deras expertis kommer att vara avgörande under de kommande åren, och vi har gjort ett fantastiskt jobb med att nå ut till fakultetsmedlemmar och forskare från platser som University of Washington, Duke University och Carnegie Mellon University, sa Culver.
Enligt Culver, att ta detta forskningsprojekt in i nästa steg med hjälp från samarbetspartners kommer att leda till enorma möjligheter för framtida soldater i strid, ett kritiskt krav med tanke på arten av det ständigt föränderliga slagfältet.