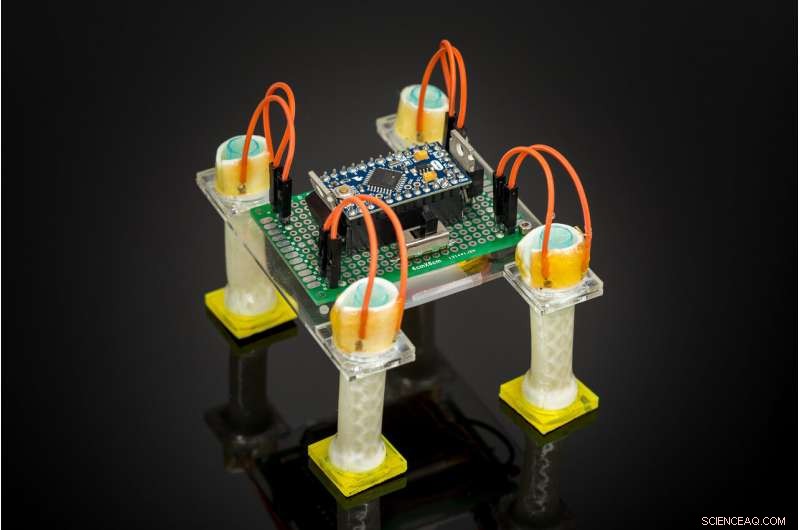
Elektriskt styrd, obunden mjuk robot byggd av fyra mjuka rörformiga ställdon, en mikrokontroller och batteri. Roboten kan programmeras för att gå eller bära ett föremål. Upphovsman:David Baillot/UC San Diego Jacobs School of Engineering
Ingenjörer vid University of California San Diego har utvecklat ett sätt att bygga mjuka robotar som är kompakta, bärbar och multifunktionell. Framsteget möjliggjordes genom att skapa mjuka, rörformiga ställdon vars rörelser är elektriskt styrda, gör dem enkla att integrera med små elektroniska komponenter.
Som ett bevis på konceptet, ingenjörer använde dessa nya ställdon för att bygga en mjuk, batteridriven robot som kan gå obunden på plana ytor och flytta föremål. De byggde också en mjuk gripare som kan greppa och plocka upp små föremål.
Laget, ledd av UC San Diego mekanik- och rymdteknikprofessor Shengqiang Cai, publicerade verket 11 oktober Vetenskapliga framsteg .
Ett problem med de flesta mjuka ställdon är att de levereras med skrymmande inställningar. Det beror på att deras rörelser styrs genom att antingen pumpa luft eller vätskor genom kammare inuti. Så att bygga robotar med dessa typer av ställdon skulle kräva att de kopplades till pumpar, stora kraftkällor och annan specialutrustning.
I den aktuella studien, UC San Diego ingenjörer skapade mjuka ställdon som styrs med el. "Denna funktion gör våra rörformiga ställdon kompatibla med de flesta billiga, kommersiellt tillgängliga elektroniska enheter och batterier, "Sa Cai.
Ställdonen är gjorda av en typ av material som används för konstgjorda muskler i robotar, kallas flytande kristallelastomerer. De består av flytande kristallmolekyler inbäddade i ett stretchigt polymernätverk. Det som är speciellt med dessa material är att de ändrar form, röra sig och dra ihop sig som svar på stimuli som värme eller elektricitet - liknande hur muskler drar ihop sig som svar på signaler från nervceller.
För att konstruera varje ställdon, ingenjörer klämde in tre värmetrådar mellan två tunna filmer av flytande kristallelastomer. Materialet rullas sedan in i ett rör, försträckt och utsatt för UV-ljus.
Varje värmetråd kan styras oberoende för att få röret att böja i sex olika riktningar. När en elektrisk ström passerar genom en eller två av ledningarna, det värmer upp en del av röret och får det att böja sig i riktning mot dessa trådar. När en ström skickas genom alla tre ledningarna, hela röret kontrakt, förkortas i längd. När strömmen är avstängd, röret svalnar långsamt och återgår till sin ursprungliga form.

Elektriskt styrd, obunden mjuk robot byggd av fyra mjuka rörformiga ställdon, en mikrokontroller och batteri. Roboten kan programmeras för att gå eller bära ett föremål. Upphovsman:David Baillot/UC San Diego Jacobs School of Engineering
"Att använda en externt applicerad elektrisk potential gör det enkelt att programmera positionen för varje rörformat ställdon, "sa författaren Qiguang He, en mekanisk och rymdteknisk doktorand student vid UC San Diego Jacobs School of Engineering.
Genom att kombinera flera ställdon tillsammans kunde ingenjörer bygga olika typer av mjuka robotar. De byggde en obunden, gångrobot med fyra ställdon som ben. Denna robot drivs av ett litet litium/polymerbatteri ombord. De byggde också en mjuk gripare med tre ställdon som fingrar.
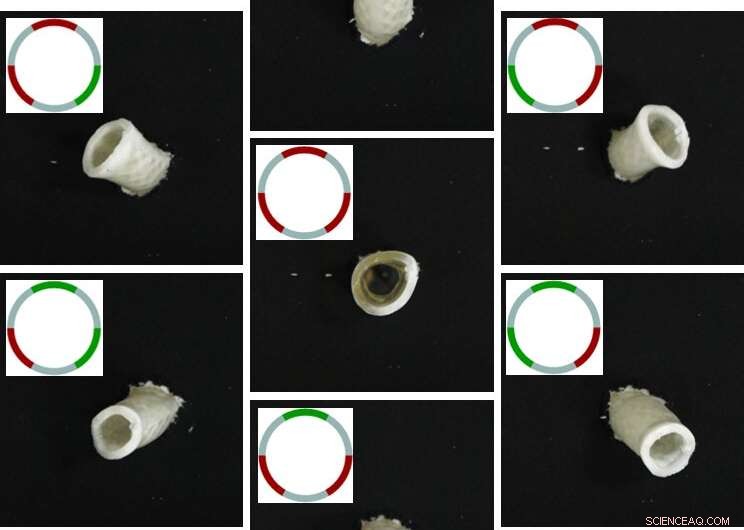
Beroende på vilka värmekablar som är elektriskt aktiverade (röda), det mjuka rörformiga ställdonet kan böja i sex olika riktningar (yttre bilder) och dra sig samman i längd (mittbild). Upphovsman:Qiguang He
Varje robot har en inbyggd mikrokontroller där ingenjörer programmerade en sekvens av elektriskt styrda rörelser för ställdonen. Detta gör att robotarna kan röra sig självständigt.
Teamet arbetar nu med att göra mjuka ställdon som kan röra sig snabbare. De nuvarande ställdonen tar cirka 30 sekunder att böja och dra ihop sig helt, och upp till fyra minuter för att återgå till sina ursprungliga former. Det beror på att materialet tar lite tid att värma upp och svalna helt. Det yttersta målet är att göra ställdon som kan dra ihop sig och slappna av lika snabbt som mänskliga muskler, Han sa.