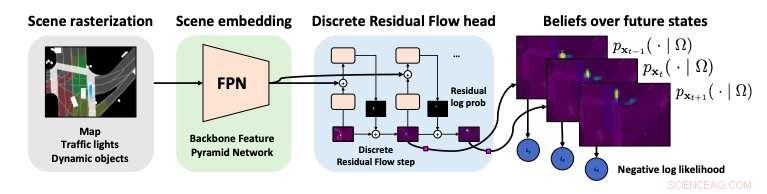
Översikt över nätverket för diskreta restflöden. Kredit:Jain et al.
Under de kommande åren, självkörande fordon kan gradvis bli ett populärt transportmedel. Innan detta kan hända, dock, forskare kommer att behöva utveckla verktyg som säkerställer att dessa fordon är säkra och effektivt kan navigera i miljöer med människor.
Eftersom självkörande fordon i slutändan är utformade för att röra sig runt både statiska och rörliga hinder, de ska kunna upptäcka föremål snabbt och undvika dem. Ett sätt att uppnå detta kan vara att utveckla modeller som kan förutsäga det framtida beteendet hos föremål eller människor på gatan, för att uppskatta var de kommer att finnas när fordonet närmar sig dem.
Förutsäga framtida förändringar i stadsmiljöer, dock, kan vara mycket utmanande. Det är särskilt svårt när det gäller att förutsäga mänskligt beteende, såsom fotgängares rörelser eller oväntade handlingar.
Förra året, en av Ubers självkörande bilar dödade Elaine Herzberg, en 49-årig kvinna, i Arizona. Denna olycka, tillsammans med dussintals andra, väckte mycket debatt om säkerheten för självkörande fordon, samt om huruvida dessa fordon bör testas i befolkade miljöer.
För ungefär en vecka sedan, nya dokument som släppts av U.S. National Transport Safety Board (NTSB) avslöjade att Ubers autonoma fordon inblandade i förra årets dödsolycka inte identifierade Herzberg som en fotgängare förrän det var alldeles för sent. Samma rapporter tyder på att det autonoma fordonet som var inblandat i kraschen aldrig tränades för att upptäcka fotgängare någonstans utanför ett övergångsställe.
Herzberg gick och gick när olyckan inträffade, så mjukvarubristerna som avslöjades av NTSB-rapporten skulle förklara varför Ubers självkörande fordon inte kunde upptäcka henne, som till slut orsakade hennes död. De nya analyserna som släppts av NTSB kan sätta stopp för företagets program för självkörande fordon, som hade börjat testa igen i december 2018 efter att ha varit pausad i flera månader.
Dessa nya rön understryker behovet av att utveckla mer avancerad AI och mer pålitlig programvara innan självkörande fordon kan testas på faktiska vägar. Intressant, några dagar innan NTSB släppte dessa dokument, en artikel av forskare vid Ubers Advanced Technologies Group, University of Toronto och UC Berkeley förpublicerades på arXiv, introducerar en ny teknik för att förutsäga fotgängares beteende som kallas diskret restflödesnätverk (DRF-NET). Enligt forskarna, detta neurala nätverk kan göra förutsägelser om framtida fotgängares beteende samtidigt som det fångar den inneboende osäkerheten i att förutsäga långdistansrörelser.
"Vårt lärda nätverk fångar effektivt multimodala posteriors över framtida mänskliga rörelser genom att förutsäga och uppdatera och diskretiserad distribution över rumsliga platser, " skrev forskarna i sin uppsats.
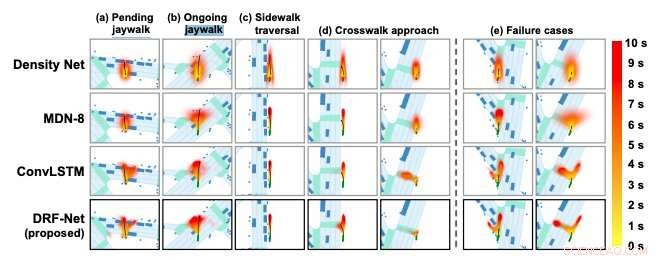
En av figurerna i den senaste tidningen som visar modellens fotgängares förutsägelser. Kredit:Jain et al.
Forskarna uttryckte övertygelser om fotgängares framtida positioner genom kategoriska fördelningar som representerar rymden. De använde sedan dessa distributioner för att planera och optimera vägar för självkörande fordon, som tar hänsyn till fotgängares förväntade positioner.
För det första, DTF-NET-nätverket som introducerades i deras papper rastrerar bilder av vägkartor, vilket innebär att den omvandlar dem till en bild som består av diskreta pixlar. Fotgängares beteenden kodas alltså in i en rastrerad bild i fågelperspektiv, som är i linje med en detaljerad semantisk karta.
Senare, nätverket extraherar funktioner som är särskilt användbara för att förutsäga fotgängares beteende från de rastrerade bilderna. Till sist, forskarna tränade sin modell för att förutsäga det framtida beteendet för fotgängare på vägen baserat på dessa egenskaper.
De tränade och utvärderade sitt neurala nätverk med hjälp av en storskalig datauppsättning som de tidigare sammanställt, som innehåller verkliga inspelningar med objektkommentarer och onlinedetekteringsbaserade spår, samlas in i flera städer i Nordamerika. Dessa inspelningar inkluderar fotgängarbanor som annoterades manuellt av forskarna i 360 grader, 120 meters räckvidd med hjälp av en LiDAR-sensor i fordonet.
I de utvärderingar som gjorts av forskarna, DTF-NET-tekniken fungerade bra, överträffar flera andra baslinjemetoder för att förutsäga fotgängares beteende. Denna metod kan således potentiellt bidra till att förbättra prestandan hos Ubers självkörande fordon, så att de kan förutse fotgängares rörelser och planera deras vägar därefter.
"The strong performance of DRF-NET's discrete predictions is very promising for cost-based and constrained robotic planning, " skrev forskarna.
Intressant, the pedestrian behaviors processed and predicted by the DTF-NET network, highlighted in one of the recent paper's figures, include 'pending jaywalk, ' 'ongoing jaywalk' and 'sidewalk traversal, ' as well as crosswalk. This seems somewhat ironic, as among other things, the recent documents released by NTSB highlighted the inability of Uber's self-driving vehicle to detect jaywalking pedestrians at the time of the crash in Arizona.
Only time will tell whether the DRF-NET network or other techniques will actually be able to improve the ability of self-driving vehicles to detect pedestrians. För närvarande, dock, one thing seems clear:Significant advancements in AI and better techniques for detecting pedestrians will be necessary before self-driving vehicles can be safely put on the road.
© 2019 Science X Network