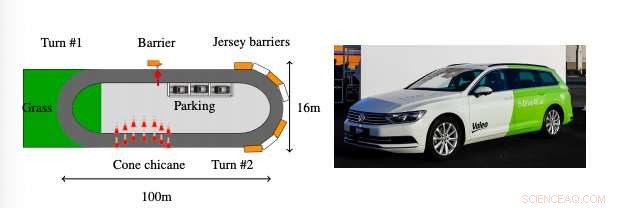
Testbana (vänster) och demonstrationsbil använd (höger). Kredit:Wirbel et al.
Forskare vid Valeo, ett teknikföretag specialiserat på fordonsinnovation, har nyligen utvecklat ett end-to-end-imitationsinlärningssystem för bilhastighetskontroll. Deras tillvägagångssätt, beskrivs i en tidning som förpublicerats på arXiv, använder ett neuralt nätverk med långtidsminne (LSTM), en typ av recurrent neural network (RNN) som kan lära sig långsiktiga beroenden.
"Valeo är världsledande inom sensorer, öron och ögon på autonoma bilar, och har redan uppnått flera världsnyheter, som de senaste experimenten med vårt Valeo Drive4U-fordon, den första autonoma bilen som demonstrerades på gatorna i Paris, Emilie Wirbel, en av forskarna som genomförde studien, berättade för TechXplore. "Mitt team och jag arbetar i ett av företagets 56 forsknings- och utvecklingscentra, undersöka hur djupinlärning kan användas för att uppnå bättre beslut och kontroll av autonoma bilar. Syftet med denna forskning var att bevisa att det är möjligt att hantera komplexa situationer som kan uppstå i stadsmiljöer genom att bara använda kameror och lära av vad en mänsklig förare kan göra."
Det nya systemet som utvecklats av Wirbel och hennes kollegor använder ett artificiellt neuralt nätverk (ANN) som bygger på tekniker för djupinlärning. Nätverket matas med demonstrationer av en människa som kör en bil som är tagna från en frontalkamera och som därför liknar vad personen såg när han körde.
Det neurala nätverket tränas sedan i att imitera förarens handlingar, speciellt fokus på att återskapa bilens aktuella hastighet. Till exempel, när en ingångsbild innehåller en panel för hastighetsbegränsningar på 50 km/h, nätverket ser till att bilen inte går fortare än 50 km/h.
"När det står en annan bil framför oss, en mänsklig förare kommer att sakta ner i enlighet med detta och nätverket bör lära sig att göra detsamma, Wirbel förklarade. "Vårt tillvägagångssätt försöker replikera hur en människa lär sig och kör. Nätverket tar bara emot information från frontkameran och behöver inte explicit uppfattning, till exempel, relaterade till trafikljusen eller körfälten, precis som en mänsklig förare inte har en explicit modell av exakt var linjerna är och vad deras form är."
Efter att ha tränat sitt neurala nätverk, Wirbel och hennes kollegor testade den i en simuleringsmiljö och integrerade den sedan i en riktig bil, utvärdera dess prestanda på en utmanande testbana. De fann att deras system effektivt reagerade på komplexa situationer, kontrollera bilens hastighet vid behov (t.ex. sakta ner vid trafikkoner och skarpa svängar, stannar vid barriärer och när man närmar sig varningsskyltar, etc.).
"Vår studie visar att komplexa situationer, såsom arbetszoner, oväntade hinder, etc., kan hanteras genom att bara observera vad en människa skulle göra och sedan återskapa det i nya, liknande situationer, " sa Wirbel. "Detta betyder att så länge vi har tillräckligt med demonstrationsdata, vi kan hantera användningsfall som mänskliga förare rimligen skulle hantera. Detta skulle kunna användas i komplexa interaktionssituationer i kombination med de mer klassiska metoderna, för att få fordonet att kunna reagera konsekvent och smart."
Systemet som tagits fram av Wirbel och hennes kollegor har uppnått mycket lovande resultat och kan snart tillämpas på autonoma fordon, vilket leder till effektivare hastighetskontroll och mer intuitiv körning. Forskarna planerar att utöka sitt proof of concept till mer komplexa situationer, lära sitt system att hantera ett bredare utbud av interaktioner med andra fordon på vägen, samt lägga till mer komplexa manövrar, som att byta fil, svänger i korsningar, eller navigera i rondeller.
"Vi skulle också vilja arbeta med systemets förklaringsbarhet och kompatibilitet med befintliga autonoma fordon, ge en förklaring till slutanvändaren om hur nätverket uppfattar sin miljö och varför det fattar sina beslut, Wirbel tillade. "Forskningsfärdplanen är mycket bred, så vi deltar och bidrar till stora vetenskapliga konferenser för att hålla jämna steg med den senaste utvecklingen inom detta område. Vår roll som ett FoU-team är också att förse resten av Valeo med rätt nycklar och expertis för att föra våra proofs of concept närmare produktion."
© 2019 Science X Network