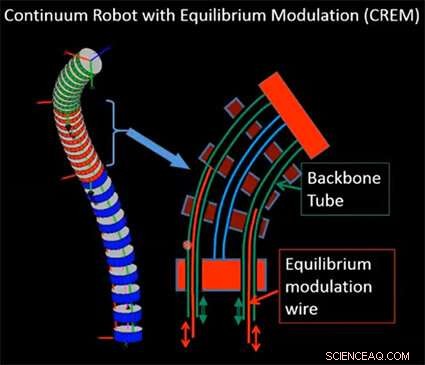
Förstärkning av en befintlig makroskala, multi-backbones robot med mikron-skala rörelsefunktioner uppnås genom att lägga till ledningar (röda) inuti strukturen som kan glida in och ut ur de rörformade ryggraden. Detta möjliggör modulering av jämviktsformen. Roboten uppnår fortfarande storskalig (makro) rörelse med hjälp av de rörformiga sekundära ryggraden som är fast fastsatta på den övre röda skivan. Genom direkt aktivering, trycka och dra på dem, kontinuumrobotkonfigurationen ändras. Upphovsman:Vanderbilt University
En ny kontinuumrobot som designats av Vanderbilt-ingenjörer uppnår rörelser i flera skalor och kan öppna en enorm värld av tidigare omöjliga komplexa mikrokirurgier.
Roboten kan tillhandahålla både en stor arbetsyta för makrorörelser som behövs för kirurgiskt ingrepp och en liten arbetsyta för mikrorörelser med rörelseupplösningar på 1 mikron eller mindre. För en känsla av skala, en tum innehåller 25, 400 mikron. En mänsklig röd blodkropp är cirka åtta mikron bred, samma storlek som vissa bakterier och betydligt mindre än bredden på det genomsnittliga människohåret.
"Vår design uppnår rörelseupplösningar på 1 mikron eller mindre genom att använda billiga ställdon. Denna omkonfigurering-med minimal extra kostnad-kan påskynda utvecklingen av en ny klass av kirurgiska robotar som kan både makro-rörelse för kirurgiskt ingrepp och mikroskala rörelse för avbildning eller intervention på cellulär nivå, "sa Nabil Simaan, professor i maskinteknik och chef för Advanced Robotics and Mechanism Applications Laboratory.
"Detta utökar kraftigt robotikens möjligheter vid minimalt invasiv kirurgi, " han sa.
Miniatyriseringen och rörelseomfånget skulle möjliggöra exakt kontroll under procedurer på komplexa aneurysmer, små vener och artärer, nerver och ögats känsliga strukturer, innerörat och stämbanden. Potentiella tillämpningar inkluderar biopsier, tumörutrotning och riktad läkemedelsleverans på cellnivå.
Simaan och hans team har anpassat den flexibla arkitekturen för hans tidigare kontinuumrobot för att utföra i makro- och mikroskala genom att ändra robotens jämviktsställning, som Simaan kallar kontinuumrobotar med jämviktsmodulering, eller CREM.
Den flexibla arkitekturen för tidigare kontinuumrobotar uppnådde en maskliknande rörelse för makromanipulation. Roboten är segmenterad med skivor eller ringar som kroppen av en daggmask. Varje skiva är sammanfogad av små ryggradar, eller aktiveringsrör. Genom att lägga till små elastiska trådar inuti manöverrören och flytta trådarna upp eller ner, plattornas statiska jämvikt förändras, skapa rörelse i mikrometerskalan.
"Den här nya klassen av robotar kommer att ge mikroprecision samtidigt som den korsar makroskala linjära vägar till operationsplatsen. Potentiella fördelar inkluderar exakt vävnadsrekonstruktion och fullständig kirurgisk utrotning av tumörer, "sa Simaan, ett dotterbolag till Vanderbilt Institute for Surgery and Engineering.
Roboten använder rörformiga sekundära ryggrader för att uppnå den stora rörelsen. Genom att trycka och dra på dem, kontinuumrobotkonfigurationen ändras. Tillägget av trådar som kan glida in och ut ur de rörformade ryggraden gjorde det möjligt för forskargruppen att modulera jämviktsformen.
Dessutom, omfattande tester pågår för införlivande av optisk koherens tomografi, som effektivt är "optiskt ultraljud" som tillåter avbildande reflektioner inifrån vävnad.
Simaan och hans kollegor, maskinteknik doktorand Giuseppe Del Giudice, Forskningsassistent professor i oftalmologi och bildvetenskap Jin-Hui Shen och läkare Karen M. Joos, Joseph N. och Barbara H. Ellis familjeprofessor i oftalmologi, har genomfört en preliminär integration av en specialtillverkad OCT-sond.
Joos speciella forskningsintresse är användningen av miniatyr -OCT -sonder med robotkirurgiska verktyg för att förbättra visualiseringen av ingrepp i ögat. Del Giudices expertis är inom design och kontroll av mikrokontinuum medicinska robotar, specifikt mikromanipulation för oftalmisk kirurgi.
Att utöka möjligheterna för en standardkontinuumrobot när det gäller rörelse och inriktning i mikroskala kan ha en djup inverkan på mikrokirurgi genom att ge betydligt ökad fingerfärdighet, kontrollerbarhet och precision för kirurger eller till och med banbrytande av tidigare omöjliga ingrepp, Sa Simaan.