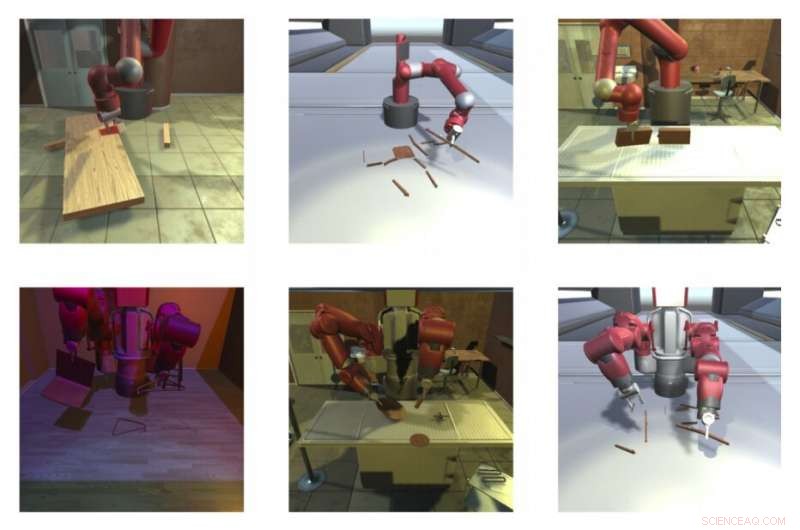
Skärmdumpar av IKEAs möbelmonteringsmiljö. Upphovsman:Lee et al.
För att utföra komplexa vardagliga uppgifter som att använda utrustning, laga mat eller bygga möbler, robotar ska kunna planera sina handlingar och manipulera föremål i sin omgivning. Än så länge, dock, lära robotar att utföra komplicerade uppgifter, sådana som kräver planering under en längre tidsperiod, har visat sig vara ganska utmanande, också på grund av brist på tillförlitliga simulerade miljöer att testa dem i.
Med detta i åtanke, forskare vid University of Southern Carolina har nyligen utvecklat IKEAs möbelmonteringsmiljö, en simuleringsplattform där forskare kan testa agenter med artificiell intelligens (AI) på komplexa manipulationsuppgifter. I den miljö de utvecklade, presenteras i en tidning förpublicerad på arXiv, agenter kan utvärderas på en mängd olika manipulationsuppgifter som involverar att bygga och manipulera olika möbler.
"Miljön är utformad för att främja förstärkningsinlärning från enkla leksaksuppgifter till komplexa uppgifter som kräver både långsiktig planering och sofistikerad kontroll på låg nivå, " skrev forskarna i sin uppsats.
Att montera möbler kan vara en utmanande uppgift även för människor, eftersom det vanligtvis kräver både långsiktig planering och sofistikerade manipulationsfärdigheter. Miljön utvecklad av forskarna, som är ganska lätt att använda, har flera intressanta funktioner. Eftersom det genererar en stor mängd syntetisk märkt data, den kan användas för att träna datorseendemodeller på ett brett spektrum av uppgifter, inklusive uppskattning av objektposition, scenförståelse, och många fler, utan att kräva mänskligt kommenterade data.
Dessutom, miljön skulle kunna fungera som ett riktmärke för maskininlärningsmetoder utformade för möbelmontering eller andra manipulationsuppgifter med lång horisont, förbättra sina kontroll- och planeringsförmåga. Intressant, den visuella och interaktiva data som produceras av plattformen kan också användas för att skaffa domänspecifik kunskap för andra applikationer, såsom intuitiva fysikmodeller.
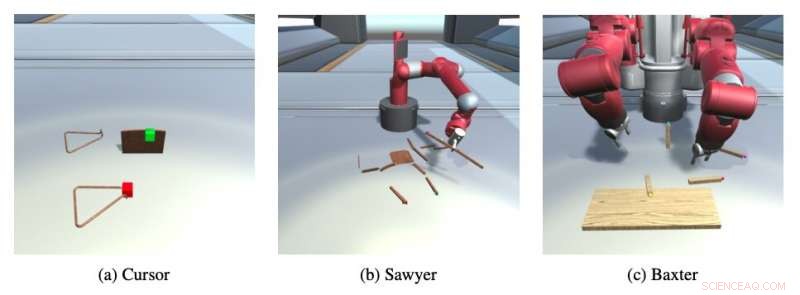
De tre robotarna som för närvarande stöds av plattformen. Upphovsman:Lee et al.
IKEAs möbelmonteringsmiljö stöder över 80 möbelmodeller och kan anpassas med bakgrundsbilder, belysning och texturer. Det skulle i slutändan kunna ses som en testbädd för maskininlärningstekniker utformade för att ge robotar avancerade objektmanipuleringsfärdigheter.
Än så länge, miljön kan användas för att träna eller testa tre robotar i olika former och storlekar, kallas markör, Sawyer och Baxter. I nästa uppdatering, dock, forskarna planerar också att lägga till stöd för Fetch, UR, Jaco och andra populära robotar.
I framtiden, denna anpassningsbara miljö kan öppna nya möjligheter för utbildning och utvärdering av många maskininlärningstekniker för robotapplikationer. Sålänge, forskarna planerar att uppdatera plattformen och förbättra några av dess funktioner.
Till exempel, de skulle vilja lägga till stöd för 3D-rörelseenheter, tillåter användare att fjärrstyra robotar och skapa demonstrationsvideor med hjälp av en VR-kontroller eller 3D-mus. Dessa demonstrationsvideor kan sedan användas för att träna maskininlärningsmodeller, använda en strategi som kallas imitationsinlärning.
I framtida versioner av plattformen, användare kan också tillåtas att vägleda robotar via talade instruktioner, och kanske till och med kan utbilda flera agenter samtidigt. Dessutom, robotar kan så småningom utbildas i hur man använder specifika verktyg, som skruvmejslar och hammare.
© 2019 Science X Network