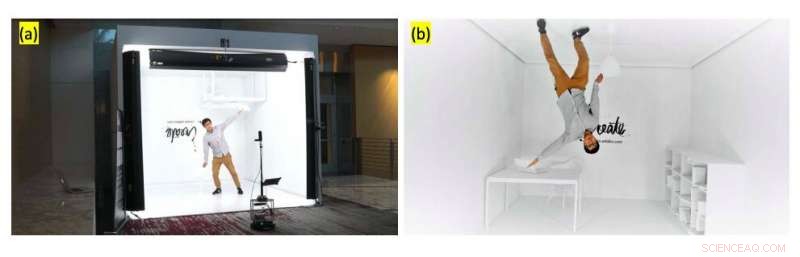
Den LeRop-drivna roboten på jobbet. Upphovsman:Kang et al.
Att ta fotografier av god kvalitet kan vara en utmanande uppgift, eftersom det vanligtvis kräver att hitta perfekta platser, vinklar och ljusförhållanden. Även om konstnärliga bilder hittills främst har tagits av mänskliga fotografer, under de senaste åren, några forskare har börjat undersöka möjligheten att ta bilder automatiskt med robotar.
För detta ändamål, ett team av forskare vid Purdue University och Adobe Research har nyligen utvecklat ett nytt ramverk som gör att en robot automatiskt kan ta fotografier av människor, specifikt porträtt. Denna ram, presenterad i ett papper förpublicerat på arXiv, får robotar att följa en mänsklig användare till en idealisk plats och sedan ta en bild av dem.
LeRop, den ram som forskarna utvecklat, var speciellt utformad för att ta inomhusporträtt av människor. Först, ramverket leder en robot mot en gynnsam eller önskad plats för att ta bilder och sedan använder den en fotoutvärderingsmodell för att föreslå de bästa vyerna, samt djupförstärkningsinlärning (DRL) modell för att justera robotens position och orientering för att säkerställa de bästa ljusförhållandena.
"När komponering är aktiverad, roboten försöker justera sin position för att bilda den vy som bäst matchar den givna mallbilden och slutligen tar ett fotografi, "forskarna skrev i sitt papper." En mallbild kan förutsägas dynamiskt med hjälp av en fotoutvärderingsmodell från hyllan genom ramverket, eller väljs manuellt från en fördefinierad uppsättning av användaren. "
LeRop är en interaktiv ram, som användare kan programmera det för att följa ett mål till den plats där hon vill ta ett fotografi. När användaren når den platsen, roboten börjar leta efter den bästa vyn att fånga. LeRops DRL -komponent är det som i slutändan gör det möjligt att justera sin synvinkel baserat på hur den matchar mallbilder.
Forskarna bestämde sig för att utrusta roboten med en 360-graders kamera och en högkvalitativ huvudkamera, eftersom detta gör att den hela tiden kan se hela sin omgivning utan att kontinuerligt rotera eller byta till olika synpunkter. Intressant, ramverket har en modulär struktur, vilket innebär att alla dess modeller kan bytas ut eller anpassas utifrån en användares behov.
Teamet utvärderade LeRop i en mängd olika testprov på tre inomhusscener, integrera den i en enkel robot som heter Turtlebot. Roboten tog 20 fotografier av en mänsklig användare i var och en av dessa tre inställningar, 10 med en fördefinierad mall och 10 med mallar som den genererade dynamiskt.
Det genomsnittliga antalet justeringar som gjorts av roboten var 11,20 för fördefinierade mallar och 12,76 för dynamiskt genererade. Dessutom, med hjälp av forskarnas ramar, roboten kunde ta bilder på en genomsnittlig tid på 22,11 sekunder med fördefinierade mallar och 22,40 sekunder med dynamiskt genererade.
LeRop-ramverket kan vara ett första steg mot skapandet av ett effektivt robotfotograferingssystem som kan ta högkvalitativa porträtt snabbt och automatiskt. Dock, systemet utvecklat av forskarna har fortfarande ett antal begränsningar som kan hindra det från att antas i stor skala. Till exempel, än så länge, den har begränsad inbyggd beräkningseffekt, och fungerar därmed bara på en kraftfull fjärrdator.
Dessutom, forskarna har hittills bara integrerat det i Turtlebot, som är en enkel robot med mycket få frihetsgrader. I deras nästa verk, de skulle vilja testa sitt system på en mer komplex robot med fler grader av frihet.
"Vårt system stöder för närvarande bara ett enpersonsporträtt, "skrev forskarna." Ny policy skulle behöva omskolas för att få bättre stöd för att ta gruppbilder. I framtida arbete, vi skulle också vilja testa olika fotoutvärderingsestetiska modeller och utvidga arbetet till utomhusscener. "
© 2019 Science X Network