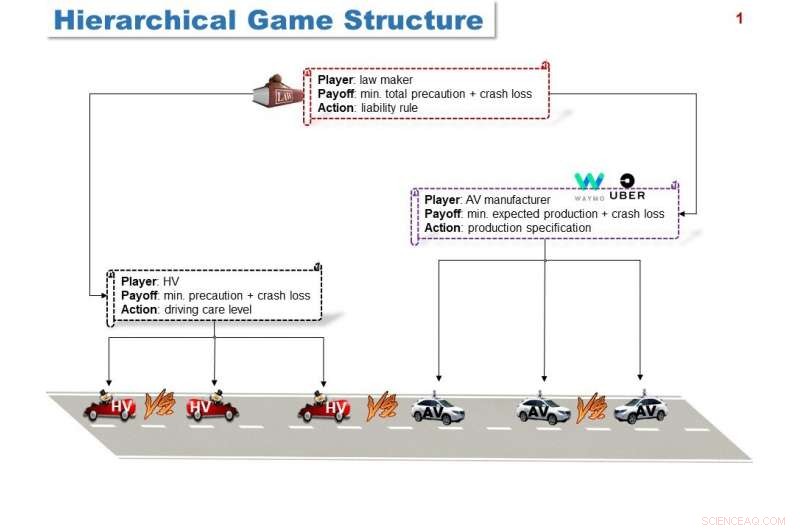
Hierarkisk spelstruktur, illustrerar de treskiktiga hierarkiska strategiska interaktionerna mellan lagstiftaren, AV-tillverkaren, AVs, och HVs på vägar. Varje spelare har distinkta eller till och med motstridiga mål, som syftar till att välja en strategi för att optimera hans eller hennes mål. Kredit:Sharon Di och Xu Chen/Columbia Engineering
Ett nyligen fattat beslut av National Transpiration Safety Board (NTSB) om Uber-kraschen i mars 2018 som dödade en fotgängare i Arizona delar upp skulden mellan Uber, företagets autonoma fordon (AV), säkerhetsföraren i fordonet, offret, och delstaten Arizona. Med tillkomsten av självkörande bilar, NTSB:s resultat väcker ett antal frågor om osäkerheten i dagens rättsliga ansvarssystem. I en olycka med en AV och en mänsklig förare, vem är ansvarig? Om båda är ansvariga, hur ska olycksfallsförlusten fördelas mellan dem?
AV:er tar bort människor från den praktiska uppgiften att köra bil och utgör därmed en komplex utmaning för dagens skadeståndslagstiftning, som i första hand straffar människor. Juridiska experter räknar med att genom att programmera köralgoritmer, självkörande biltillverkare, inklusive bildesigners, sensorleverantörer, mjukvaruutvecklare, biltillverkare, och närstående som bidrar till designen, tillverkning, och testning, kommer att ha ett direkt inflytande på trafiken. Även om dessa algoritmer gör tillverkarna oumbärliga aktörer, där deras produktansvar potentiellt spelar en avgörande roll, beslutsfattare har ännu inte utarbetat en kvantitativ metod för att fördela förlusten mellan den självkörande bilen och den mänskliga föraren.
För att ta itu med detta problem, forskare vid Columbia Engineering och Columbia Law School har utvecklat en gemensam felbaserad ansvarsregel som kan användas för att reglera både självkörande biltillverkare och mänskliga förare. De föreslår en spelteoretisk modell som beskriver de strategiska interaktionerna mellan lagstiftaren, den självkörande biltillverkaren, den självkörande bilen, och mänskliga förare, och undersöka hur när marknadspenetrationen för AVs ökar, ansvarsregeln bör utvecklas.
Deras resultat beskrivs i en ny studie som presenteras den 14 januari av Sharon Di, biträdande professor i civilingenjör och ingenjörsmekanik, och Eric Talley, Isidor och Sevilla Sulzbacher professor i juridik, vid Transportation Research Boards 99:e årsmöte i Washington, D.C
Medan de flesta aktuella studier har fokuserat på att designa AVs köralgoritmer i olika scenarier för att säkerställa trafikeffektivitet och säkerhet, de har inte utforskat mänskliga förares beteendeanpassning till AVs. Di och Talley undrade över den "moraliska risken"-effekten på människor, vare sig med exponering för mer och mer trafikmöten med AVs, människor kan vara mindre benägna att utöva "vederbörlig försiktighet" när de möter AV:er på vägen och kör på ett mer riskfyllt sätt.
"Mänskliga förare uppfattar AV:er som intelligenta agenter med förmågan att anpassa sig till mer aggressiva och potentiellt farliga mänskliga körbeteenden, säger Di, som är medlem i Columbias Data Science Institute. "Vi fann att mänskliga förare kan dra nytta av denna teknik genom att köra slarvigt och ta fler risker, eftersom de vet att självkörande bilar skulle utformas för att köra mer konservativt."
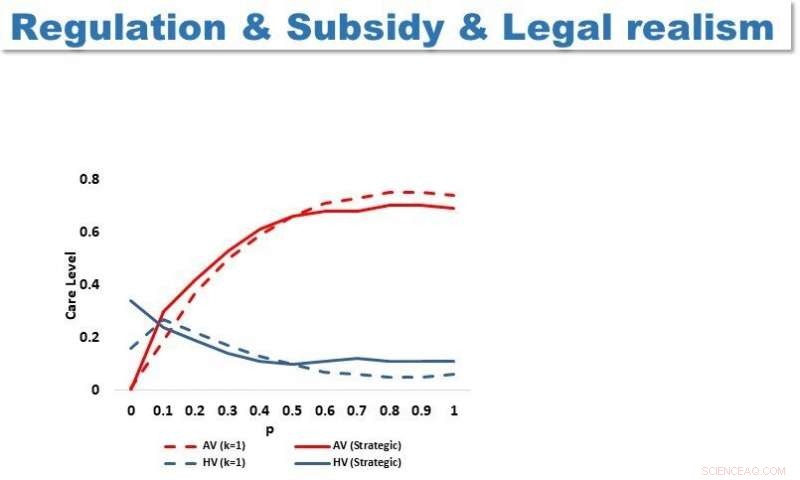
Teamet fann att en optimalt utformad ansvarspolicy är avgörande för att förhindra mänskliga förare från att utveckla moralisk risk och för att hjälpa AV-tillverkaren med en avvägning mellan trafiksäkerhet och produktionskostnader. Kredit:Sharon Di och Xu Chen/Columbia Engineering
Forskarna använde spelteori för att modellera en värld med interagerande spelare som försöker välja sina egna handlingar för att optimera sina egna mål. Spelarna – lagstiftare, AV-tillverkare, AVs, och mänskliga förare – har olika mål i transportekosystemet. Lagstiftare vill reglera trafiken med förbättrad effektivitet och säkerhet, självkörande biltillverkare är vinstdrivna, och både självkörande bilar och mänskliga förare interagerar på allmänna vägar och försöker välja de bästa körstrategierna. För att fånga den komplexa interaktionen mellan alla spelare, forskarna tillämpade spelteoretiska metoder för att se vilken strategi varje spelare lägger sig på, så att andra inte drar fördel av hans eller hennes beslut.
Det hierarkiska spelet hjälpte teamet att förstå de mänskliga förarnas moraliska risk (hur mycket risk förare kan besluta sig för att ta på sig), AV-tillverkarens påverkan på trafiksäkerheten, och lagstiftarens anpassning till det nya transportekosystemet. De testade spelet och dess algoritm på en uppsättning numeriska exempel, ger insikter om beteendeutvecklingen hos AV och HV när AV-penetrationshastigheten ökar och eftersom kostnads- eller miljöparametrar varierar.
Teamet fann att en optimalt utformad ansvarspolicy är avgörande för att förhindra mänskliga förare från att utveckla moralisk risk och för att hjälpa AV-tillverkaren med en avvägning mellan trafiksäkerhet och produktionskostnader. Statliga subventioner till AV-tillverkare för att minska produktionskostnaderna skulle i hög grad uppmuntra tillverkare att producera AV-apparater som avsevärt överträffar mänskliga förare och förbättrar den övergripande trafiksäkerheten och effektiviteten. Dessutom, om AV-tillverkare inte är reglerade i termer av AV-teknikspecifikationer eller inte är korrekt subventionerade, AV-tillverkare tenderar att vara rent vinstorienterade och destruktiva för det övergripande trafiksystemet.
"Det tragiska dödsfallet i Arizona som involverade en självkörande bil väckte enorm uppmärksamhet från allmänheten och beslutsfattare om hur man drar gränserna för det juridiska ansvaret när AVs interagerar med mänskliga förare, cyklister, och fotgängare, ", tillägger Talley. "Uppkomsten av AVs introducerar en särskilt svår typ av osäkerhet i status quo, och en som återkopplar till AV-tillverkning och design. Rättsligt ansvar för olyckor mellan bilar och fotgängare involverar vanligtvis en komplex kalkyl av jämförande felbedömningar för var och en av de tidigare nämnda grupperna. Införandet av ett autonomt fordon kan komplicera saken ytterligare genom att lägga till andra parter i mixen, såsom tillverkare av hårdvara och programmerare av mjukvara. Och försäkringsskyddet förvränger saken ytterligare genom att inkludera tredje parts intressenter. Vi hoppas att våra analytiska verktyg kommer att hjälpa AV-politikare med deras regulatoriska beslut, och därvid, kommer att bidra till att mildra osäkerheten i den befintliga regulatoriska miljön kring AV-teknik."
Di och Talley tittar nu på flera AV-tillverkare som riktar sig till olika globala marknader med olika tekniska specifikationer, göra utvecklingen av rättsregler ännu mer komplex.
"Vi vet att mänskliga förare kommer att ta fler risker och utveckla moralisk risk om de tror att deras vägmiljö har blivit säkrare, " Di konstaterar. "Det är uppenbart att en optimal utformning av ansvarsregeln är avgörande för att förbättra social välfärd och trafiksäkerhet med avancerad transportteknik."














