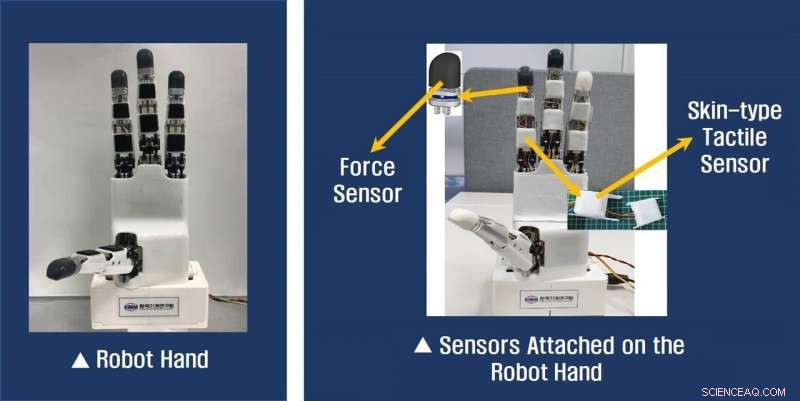
Taktil sensor-integrerad robothand. Kredit:Korea Institute of Machinery and Materials (KIMM)
Korea Institute of Machinery &Materials (President Chunhong Park; härefter "KIMM") utvecklade en robothand som kan hantera olika föremål och verktyg i det dagliga livet, som att hålla ett ägg och klippa papper med en sax. Handen kan enkelt monteras på en mängd olika robotarmar, och erbjuder världens starkaste gripkraft mot sin egen vikt. Det förväntas att användningen av robothänder kommer att utvidgas till såväl industrianläggningar som till vardagslivet.
Teamet ledd av Dr. Hyunmin Do, huvudforskare vid Institutionen för robotik och mekatronik under Advanced Manufacturing Systems Research Division av KIMM, utvecklat en robothand som kan hantera föremål på samma sätt som mänskliga händer genom att efterlikna strukturen och rörelsen hos ett mänskligt fingrar.
Robothanden består av fyra fingrar och 16 leder. Totalt 12 motorer används för att flytta varje finger och led oberoende.
Forskargruppen utvecklade en unik mekanism för att stödja rörelse i små utrymmen med hög grad av frihet, liknar en mänsklig hands rörelse. De lyckades modulisera drivenheten som ansvarar för fingerrörelser genom att bädda in den i handflatan. Robothanden kan enkelt monteras på en mängd olika robotarmar.
Dessutom, den utvecklade robothanden är lättare och starkare än kommersiellt tillgängliga robothänder. Dess vikt är mindre än 1 kg, men dess nyttolast är mer än 3 kg.
Forskargruppen utvecklade två typer av kraftsensorer för att möjliggöra taktil avkänning för att upptäcka kontakt med föremål, och fäste dem vid fingertopparna, fingrar och handflatan. Sensorerna som är fästa på fingertopparna är fleraxliga kraft-/vridmomentsensorer med en diameter på 15 mm och en vikt på mindre än 5 g. De kan mäta storleken och riktningen av kraft som upptäcks vid fingertoppen när robothanden kommer i kontakt med ett föremål. Sensorerna är nyckeln till att kontrollera greppkraften.
Taktila sensorer av hudtyp som utvecklats genom gemensam forskning med Seoul National University fästes också på fingrar och handflatan. Dessa sensorer mäter kraftfördelningen vid kontaktytan när robothanden vidrör ett föremål.
Kommersiella robothänder som utvecklats hittills har begränsade tillämpningar, eftersom det inte finns några modulariserade produkter utrustade med både drivenheterna inbäddade i handflatan och de inbyggda taktila sensorerna.
Dr. Hyunmin Do sa, "Robothanden utvecklades för att hantera olika föremål inklusive de verktyg som används i vardagen genom att efterlikna den känsliga rörelsen hos en mänsklig hand. Den förväntas också användas som en forskningsplattform för att studera greppalgoritmen för robothand och manipulationsintelligens. "