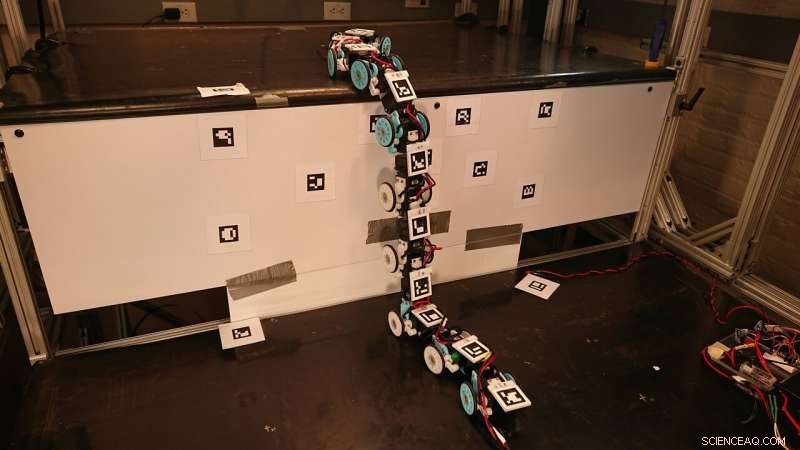
Johns Hopkins Universitys Terradynamics Lab skapade denna ormrobot för att efterlikna dess djurmotsvarighet. Kredit:JHU/Will Kirk
Ormar lever i olika miljöer, allt från outhärdligt varma öknar till frodiga tropiska skogar, där de glider uppför träd, stenar och buskar varje dag. Genom att studera hur dessa ormar rör sig, Johns Hopkins ingenjörer har skapat en ormrobot som smidigt och stabilt kan klättra stora steg.
Teamets nya rön, publiceras i Journal of Experimental Biology och Royal Society Open Science , främja skapandet av sök- och räddningsrobotar som framgångsrikt kan navigera i förrädisk terräng.
"Vi ser till dessa läskiga varelser för rörelseinspiration eftersom de redan är så skickliga på stabilt skalande hinder i sitt dagliga liv. Förhoppningsvis kan vår robot lära sig att bobba och väva över ytor precis som ormar, " säger Chen Li, en biträdande professor i maskinteknik vid Johns Hopkins University och tidningens senior författare.
Tidigare studier hade främst observerat ormrörelser på plana ytor, men sällan i 3D-terräng förutom på träd, säger Li, och ta inte hänsyn till verkliga stora hinder som bråte och skräp som sök- och räddningsrobotar skulle behöva klättra över.
Lis team studerade först hur den variabla kungsormen, en orm som ofta kan finnas i både öknar och tall-ekskogar, klättrade steg i Li's Terradynamics Lab. Lis labb förenar robotteknikens områden, biologi och fysik tillsammans för att studera djurens rörelser för tips och tricks för att bygga mer mångsidiga robotar.
"Dessa ormar måste regelbundet resa över stenblock och fallna träd; de är mästare i rörelse och det finns mycket vi kan lära av dem, säger Li.
Li och hans team körde en serie experiment, ändra steghöjden och stegens ytfriktion för att observera hur ormarna förvrängde sina kroppar som svar på dessa barriärer.
De fann att ormar delade upp sina kroppar i tre sektioner:deras främre och bakre kropp slingrade sig fram och tillbaka på de horisontella stegen som en våg medan deras mellankroppssektion förblev stel, svävar bara så, att överbrygga det stora steget. De slingrande delarna, de märkte, gav stabilitet för att hålla ormen från att välta.
När ormarna kom närmare och upp på steget, de tre kroppssektionerna reste ner för varje kroppssegment. När fler och fler av ormen nådde steget, dess främre kroppsdel skulle bli längre och den bakre delen skulle bli kortare medan mittkroppssektionen förblev ungefär lika lång, hängande vertikalt ovanför de två stegen.
Om stegen blev högre och halare, ormarna rör sig långsammare och vrider sin främre och bakre kropp mindre för att bibehålla stabiliteten.
Efter att ha analyserat deras videor och noterat hur ormar klättrade steg i labbet, Qiyuan Fu, en doktorand i Lis labb, skapat en robot för att efterlikna djurens rörelser.
I början, robotormen hade svårt att hålla sig stabil på stora trappsteg och vinglade och vände ofta eller fastnade på trappstegen. För att ta itu med dessa problem, forskarna satte in ett fjädringssystem (som det i din bil) i varje karosssegment så att det kunde tryckas ihop mot ytan vid behov. Efter det här, ormroboten var mindre vinglig, mer stabila och klättrade steg upp till 38% av sin kroppslängd med en nästan 100% framgång.
Jämfört med ormrobotar från andra studier, Lis ormrobot var snabbare och stabilare än alla utom en, och till och med var nära att efterlikna den faktiska ormens hastighet. En nackdel med det extra kroppsupphängningssystemet, dock, använde roboten mer el.
"Djuret är fortfarande mycket mer överlägset, men dessa resultat är lovande för robotar som kan färdas över stora hinder, " tillägger Li.
Nästa, teamet kommer att testa och förbättra ormroboten för ännu mer komplex 3D-terräng med mer ostrukturerade stora hinder.














