Kredit:Tan et al.
Självrekonfigurerbara robotar (SRR) som automatiskt kan ändra form och anpassa sig till sin omgivande miljö har nyligen tilldragit sig stort intresse inom robotforskningssamhället. Dessa robotar kan ha flera användbara tillämpningar, eftersom de kan förvärva en hög grad av självständighet när det gäller att känna av sin omgivning, samt att planera och utföra lämpliga åtgärder. Medan tidigare studier har introducerat metoder för att klassificera dessa robotar i undergrupper, det finns fortfarande ingen standardprocedur för att utvärdera deras prestationer.
Med detta i åtanke, forskare vid Sun Yat-sen University i Kina och och Singapore University of Technology and Design har nyligen utvecklat ett ramverk för taxonomi och utvärdering (TAEV) av självomkonfigurerbara robotar. Deras studie, med i IEEE Access , finansierades av Singapore National Robotics R&D Program Office.
"Än så länge, forskare har utarbetat en kvalitativ metod för att klassificera SRR, men inte kvantitativa metoder som kan vägleda designern, tillverkare och robotanvändare, "Abdullah Aamir Hayat, en av forskarna som genomförde studien, berättade för TechXplore. "Detta motiverade oss att utveckla ett ramverk och en utvärderingsmetod för SRR."
I SRR, förmågan att ändra form för att slutföra en given uppgift beror främst på typen av mekanismer som används av robotarna och deras nivå av autonomi. Medan vissa SRR-system är helt autonoma, andra kräver en viss grad av manuell teleoperation.
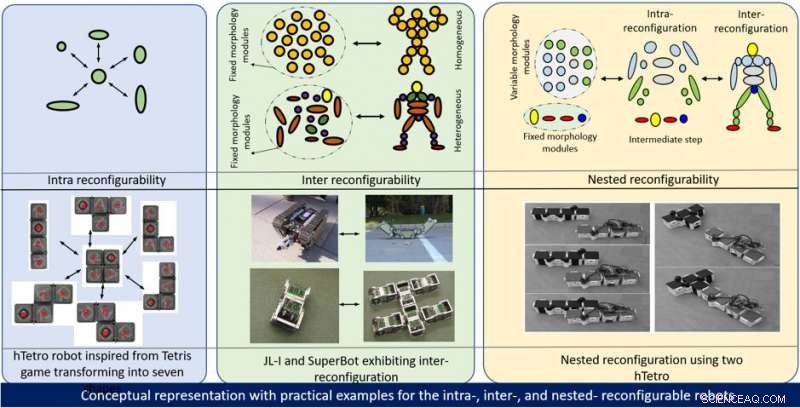
På en mekanisk nivå, robotarna kan klassificeras i tre huvudkategorier:de med en intra-, mellan-, och kapslad omkonfiguration. Skillnaden mellan intra- och inter-rekonfigurationer ligger i antalet tillgängliga konfigurationer för roboten och skalan på dessa konfigurationer.
Skillnaden mellan intra- och inter-omkonfigurerbarhet är att den förra involverar en enda robotmodul som kan ändra sin morfologi utan någon montering eller demontering och den senare involverar två eller flera moduler som kan monteras eller demonteras. Att integrera både inter och intra ger den kapslade omkonfigurerbarheten. Kredit:Tan et al.
Intra omkonfigurerbarhet involverar en enda robotmodul som kan ändra sin morfologi utan någon montering eller demontering, medan omkonfigurerbarhet involverar två eller flera moduler som kan monteras eller demonteras. Till sist, kapslad omkonfiguration, myntad av Prof. Mohan Rajesh Elara och Prof. Kristin L. Wood, kombinerar funktioner i både intra- och inter-rekonfigurationer.
I deras tidning, Hayat och deras kollegor introducerade mätvärden som kan användas för att utvärdera SRR, kvantifiera deras nivå av självständighet och antalet tillgängliga konfigurationer. Dessa mätvärden kombinerades för att skapa ett TAEV-ramverk som kunde vägleda forskare och tillverkare i att utvärdera deras robotsystem.
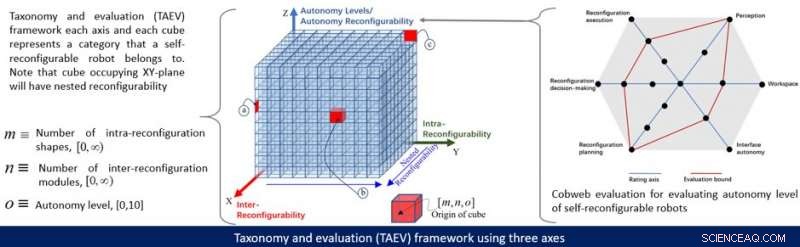
"Vårt arbete kvantifierar mekanismens omkonfigurerbarhet genom att tilldela ett index på basis av ett antal betydelsemorfologi och antalet involverade moduler, ", förklarade Hayat. "Dessa index är representerade på de två axlarna (X- och Y-) i den treaxliga ramen. Den tredje axeln (Z-) tilldelas det index som ges av nivån av autonomi som beräknas med hjälp av spindelnätsutvärderingsmodellen bestående av sex prestationsindikatorer, nämligen omkonfigureringsplanering, beslutsfattande, gränssnittsautonomi, uppfattning, och arbetsplats."
Den största fördelen med ramverket som utvecklats av Hayat och hans kollegor är att det allokerar ett unikt index till en given SRR inom det 3D-taxonomiutrymme som de beskrev i sin artikel. Som ett resultat, den skulle kunna användas för att utforma kompromissstudier och utforma metoder för att bedöma eller jämföra prestanda för olika SRR på samma uppgift.
"Det generiska ramverket vi presenterade kan tillämpas på många befintliga SRR, gör att de kan klassificeras inte bara kvalitativt baserat på deras storlek, förflyttning, etc. men också kvantitativt, införlivande av robotarnas mekanism och autonomi, " sa Hayat.
I framtiden, detta ramverk för TAEV skulle kunna hjälpa till att utvärdera SRR mer effektivt, samtidigt som de identifierar deras begränsningar och funktioner som kan förbättras. Både forskare och tillverkare skulle kunna använda det för att jämföra prestanda hos olika robotar på samma uppgifter eller för att utvärdera olika versioner av samma robot. I deras tidning, Hayat och deras kollegor diskuterar också andra potentiella tillämpningar för det nya ramverket, använda befintliga robotar som exempel.
"Våra resultat tyder på att det finns en enorm potential för nya robotdesigner med autonomi att ockupera det tredimensionella utrymmet och att kapslade omkonfigurerbara arkitekturer kan ha många praktiska tillämpningar, " sa Hayat. "Med detta i åtanke, vår grupp arbetar med att implementera nya intra-, mellan-, och kapslade omkonfigurerbara robotarkitekturer för att utföra underhållsuppgifter, nämligen autonom rengöring och övervakning."
© 2020 Science X Network