Släpp den inte - en konventionell robotgrepp på jobbet. Upphovsman:Shutterstock
Med hjälp av maskininlärning, ETH-forskare har utvecklat en ny, men ändå billig, taktil sensor. Sensorn mäter kraftfördelning vid hög upplösning och med stor noggrannhet, gör att robotarmarna kan greppa känsliga eller ömtåliga föremål.
Människor har inga problem med att plocka upp ömtåliga eller hala föremål med våra händer. Vår beröringskänsla låter oss känna om vi har ett fast grepp om föremålet eller om det är på väg att glida genom våra fingrar, så att vi kan justera styrkan i vårt grepp därefter. Robotgrepparmar som har till uppgift att plocka upp föremål som är ömtåliga eller hala eller har en komplex yta kräver också denna typ av feedback.
Robotikforskare vid ETH Zürich har nu utvecklat en taktil sensor som kan komma till nytta i just ett sådant fall - och markerar vad de ser som ett viktigt steg mot "robothud". Sensorns extremt enkla design gör det billigt att producera, som ingenjörerna påpekar. Väsentligen, den består av en elastisk silikon "hud" med färgade mikrokulor av plast och en vanlig kamera fäst på undersidan.
Mätningar med rent optisk ingång
Sensorn är synbaserad:när den kommer i kontakt med ett objekt, ett inslag visas i silikonhuden. Detta ändrar mönstret på mikropärlorna, som registreras av fisheye -linsen på sensorns undersida. Från dessa förändringar i mönstret, det är möjligt att beräkna kraftfördelningen på sensorn.
"Konventionella sensorer registrerar den applicerade kraften på bara en enda punkt. Däremot kan vår robothud låter oss skilja mellan flera krafter som verkar på sensorytan, och beräkna dem med hög upplösning och noggrannhet, "Säger Carlo Sferrazza. Han är en doktorand i gruppen som leds av Raffaello D'Andrea, Professor i dynamiska system och kontroll vid ETH Zürich. "Vi kan till och med bestämma från vilken riktning en kraft verkar, "Säger Sferrazza. Med andra ord, forskarna kan inte bara identifiera krafter som utövar vertikalt tryck på sensorn, men också skjuvkrafter, som verkar i sidled.

Den taktila sensorns prototyp. Upphovsman:ETH Zürich
Datadriven utveckling
För att beräkna vilka krafter som skjuter mikrokulorna i vilka riktningar, ingenjörerna använder en omfattande uppsättning experimentella data:i tester som standardiserades genom maskinkontroll, de undersökte en mängd olika typer av kontakt med sensorn. De kunde exakt styra och systematiskt variera platsen för kontakten, kraftfördelningen och storleken på objektet som tar kontakt. Med hjälp av maskininlärning, forskarna registrerade flera tusen fall av kontakt och matchade dem exakt med förändringar i pärlemönstret.
Den tunnaste sensorprototyp som forskarna hittills har byggt är 1,7 centimeter tjock och täcker en mätyta på 5 x 5 centimeter. Dock, forskarna arbetar med att använda samma teknik för att förverkliga större sensorytor som är utrustade med flera kameror, och kan därmed också känna igen föremål med komplex form. Dessutom, de syftar till att göra sensorn tunnare - de tror att det är möjligt att uppnå en tjocklek på bara 0,5 centimeter med hjälp av befintlig teknik.
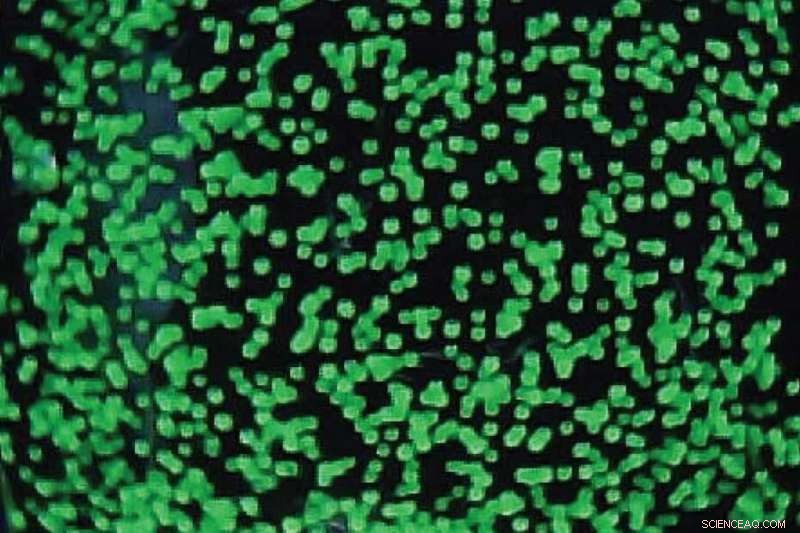
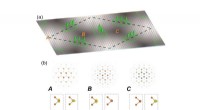
Mikropärlor på undersidan av silikonhuden. En kamera registrerar hur de rör sig när en kraft påverkar dem. Upphovsman:ETH Zürich

Automatiserade mätningar. Upphovsman:Sferrazza C et al. IEEE Access 2019
Robotik, sport och virtual reality
Eftersom det elastiska silikonet är halkfritt och sensorn kan mäta skjuvkrafter, den är väl lämpad för användning i robotgriparmar. "Sensorn känner igen när ett föremål hotar att glida ur armens grepp så att roboten kan justera sin greppstyrka, "Förklarar Sferrazza.
Forskare kan också använda en sådan sensor för att testa hårdheten hos material eller för att digitalt kartlägga beröringar. Om den är integrerad i bärbara enheter, cyklister kan mäta hur mycket kraft de utövar på cykeln genom pedalerna, eller löpare kan mäta kraften som går in i deras skor när de joggar. Slutligen, sådana sensorer kan ge information som är viktig för att utveckla taktil feedback, till exempel för virtual reality -spel.