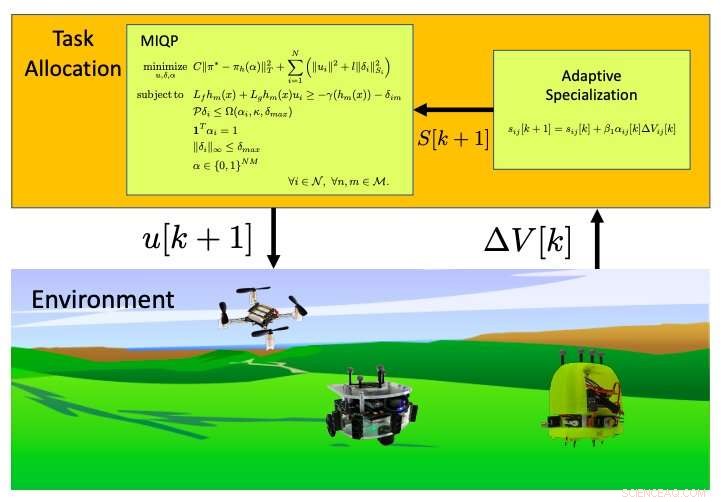
En figur som illustrerar den föreslagna återkopplingsslingan mellan ramverket för uppgiftsallokering, miljön, och uppdateringen av den adaptiva specialiseringen. Robotarnas effektivitet vid varje uppgift mäts som ∆V [k], som övergår till lagen om uppdatering av adaptiv specialisering. När de nya specialiseringsparametrarna har beräknats, uppgiftsfördelningen MIQP löses och indata skickas till robotarna. Kredit:Emam et al.
På senare år har robotar har blivit allt mer sofistikerade, därför kan de nu utföra en mängd olika uppgifter. Medan vissa robotar är designade för att fungera individuellt, till exempel tillhandahålla grundläggande hjälp i människors hem, andra kan vara mer effektiva när de distribueras i team.
Under sök- och räddningsuppdrag, till exempel efter naturkatastrofer, robotar kan vara mer effektiva som ett team, eftersom de kunde leverera förnödenheter eller söka efter överlevande snabbare, täcker större geografiska regioner. För att slutföra uppdrag som ett team mest effektivt, dock, robotar ska kunna samarbeta bra och effektivt fördela olika uppgifter mellan varandra.
Med detta i åtanke, forskare vid Georgia Institute of Technology (Georgia Tech) utvecklade nyligen ett ramverk för adaptiv uppgiftsfördelning under uppdrag som ska utföras av ett team av robotar. Deras ramar, presenteras i en tidning förpublicerad på arXiv, kan tilldela uppgifter till robotar baserat på deras unika kapacitet och egenskaper.
"Robotteam är tänkta att verka i dynamiska miljöer och den här artikeln föreslår en uppdaterad regel som gör att robotar kan veta hur pass passformade de är för var och en av de olika uppgifterna de får tilldelas i farten, "Yousef A Emam, en av forskarna som genomförde studien, berättade för TechXplore.
Ramverket som utvecklats av forskarna är baserat på en uppgiftsfördelningsteknik för heterogena multirobotsystem som de introducerade i en tidigare uppsats. Denna tidigare utarbetade strategi innebär användning av en algoritm som tar hänsyn till skillnader i individuella robotegenskaper och fördelar uppgifter därefter. Tilldelningen och utförandet av dessa uppgifter sker samtidigt.
"Vårt ramverk löser optimeringsproblem online, tala om för enskilda robotar hur de ska prioritera sina bidrag till de olika uppgifter de ska utföra (d.v.s. uppgiftsfördelning), och hur man gör det (dvs. uppgiftsutförande), " sa Emam.
I deras studie, Emam och hans kollegor byggde på den uppgiftsfördelningsstrategi som de tidigare utvecklat, gör den mer lyhörd för förändringar i robotarnas omgivande miljö. I motsats till sin tidigare version, deras nya ramverk kräver inte en explicit modell av miljön eller av robotförmågor som är okända. Istället, det tar i första hand hänsyn till de kollektiva framsteg som teamet av robotar gjort på ett givet uppdrag och varje robots prestanda på individuella uppgifter.
"I vår senaste studie, vi utvecklade en återkopplingslag som gör det tidigare utvecklade ramverket anpassat till miljöstörningar, " Emam förklarade. "Detta betyder att även om roboten inte har perfekt kunskap om hur passform den är för var och en av uppgifterna, det kommer att lära sig det i farten."
Forskarna utvärderade sitt ramverk i en serie simuleringar och fann att det gav mycket lovande resultat. I dessa experiment, deras tillvägagångssätt möjliggjorde effektiv uppgiftsfördelning mellan robotar under en mängd olika miljöförhållanden, även i de fall där kapaciteten hos enskilda robotar var okända innan de installerades.
I framtiden, ramverket för uppgiftsfördelning och utförande som utvecklats av Emam och hans kollegor kan förbättra samarbetet mellan robotar som används som ett team, förbättra deras kollektiva prestationer. Detta kan i slutändan underlätta den storskaliga mobiliseringen av robotar under sök- och räddningsuppdrag.
"Vi arbetar för närvarande på att utöka ramverket till att omfatta varje robots funktioner (t.ex. sensorer, ställdon), så att vi kan modellera funktionsfel online mer explicit, " sade Emam. "Dessutom, en annan aspekt vi tittar på är fördelningen av beräkningar mellan robotarna (decentraliserat)."
© 2020 Science X Network