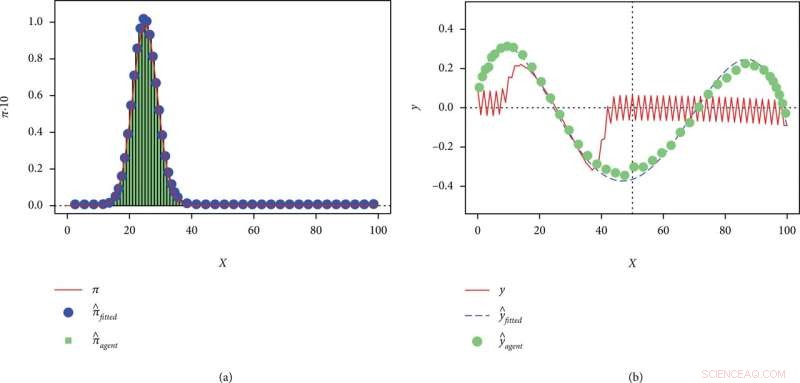
Resultat för det unimodala scenariot. Illustration av designmetoden och jämförelse med multiagentsimuleringar för det unimodala scenariot:(a) visar den stationära fördelningen och (b) den förväntade förändringen. Kredit:Intelligent Computing (2022). DOI:10.34133/2022/9761694
Algblomning, fåglar flockas och insekter svärmar. Detta en-massebeteende av enskilda organismer kan ge separat och kollektiv nytta, som att förbättra chanserna till framgångsrik parningsförökning eller ge trygghet. Nu har forskare utnyttjat de självorganiseringsförmåga som krävs för att skörda frukterna av naturliga svärmar för robotapplikationer inom artificiell intelligens, datoranvändning, sök och räddning och mycket mer.
De publicerade sin metod den 3 augusti i Intelligent Computing .
"Att designa en uppsättning regler som, när de väl utförts av en svärm av robotar, resulterar i ett specifikt önskat beteende är särskilt utmanande", säger motsvarande författare Marco Dorigo, professor i laboratoriet för artificiell intelligens, vid namn IRIDIA, vid Université Libre de Bruxelles, Belgien. "Svärmens beteende är inte en en-till-en-karta med enkla regler som exekveras av individuella robotar, utan snarare ett resultat av den komplexa interaktionen mellan många robotar som exekverar samma uppsättning regler."
Med andra ord måste robotarna samarbeta för att uppnå summan av diskreta bidrag. Problemet, enligt Dorigo och hans medförfattare Dr Valentini och Prof. Hamann, är att konventionell design för individuella enheter för att uppnå ett kollektivt mål är nerifrån och upp, vilket kräver trial-and-error-förbättringar som kan bli kostsamma.
"För att tackla den här utmaningen föreslår vi en ny global till lokal designstrategi", sa Dorigo. "Vår nyckelidé är att komponera en heterogen svärm med hjälp av grupper av beteendemässigt olika agenter så att det resulterande svärmbeteendet approximerar en användarinmatning som representerar beteendet för hela svärmen."
Denna sammansättning innebär att man väljer individuella agenter med förutbestämda beteenden som forskarna vet kommer att samarbeta för att uppnå målet för det kollektiva beteendet. De tappar förmågan att lokalt programmera enskilda enheter, men enligt Valentini, Hamann och Dorigo är avvägningen värd det. De pekade på exemplet med en övervakningsuppgift, där en svärm kan behöva övervaka en anläggning som kräver mer intern övervakning under dagen och mer extern övervakning på natten.
"Användaren ger en beskrivning av de önskade svärmallokeringarna som en sannolikhetsfördelning över utrymmet för alla möjliga svärmallokeringar - fler agenter inne under dagen, fler ute på natten eller vice versa," sa Valentini.
Användaren skulle definiera målbeteendet genom att ändra antalet och positionen för distributionens lägen, där varje läge motsvarar en specifik allokering, såsom 80 % av agenterna inne, 20 % utanför under dagen och 30 % inne, 70 % ute på natten. Detta gör att svärmen kan ändra beteende periodiskt och autonomt, förutbestämt av de inställda lägena, allteftersom omständigheterna ändras.
"Även om det är svårt att hitta de exakta kontrollreglerna för robotar så att svärmen beter sig som vi vill, kan ett önskat svärmbeteende erhållas genom att kombinera olika uppsättningar av kontrollregler som vi redan förstår," sa Dorigo. "Svärmbeteenden kan utformas makroskopiskt genom att blanda robotar med olika fördefinierade regeluppsättningar."
Det är inte första gången Dorigo har vänt sig till naturen för att förbättra datavetenskapliga metoder. Han har tidigare utvecklat algoritmen för myrkolonioptimering, baserad på hur myror navigerar mellan sina kolonier och födokällor, för att lösa svåra beräkningsproblem som innebär att hitta en bra approximation av en optimal väg på en graf.
Medan Dorigo först föreslog detta tillvägagångssätt för ett relativt enkelt problem, har det sedan dess utvecklats som ett sätt att ta itu med en mängd olika problem. Dorigo sa att han planerar att ta svärmmetoden i en liknande riktning.
"Vårt omedelbara nästa steg är att visa giltigheten av vår metodik över en större uppsättning svärmbeteenden och gå bortom uppgiftsfördelning," sa Dorigo. "Vårt yttersta mål är att förstå vad som gör detta möjligt, att formalisera en generisk teori för att tillåta forskare och ingenjörer att designa svärmbeteenden utan att gå igenom den mödosamma trial-and-error-processen." + Utforska vidare