Kredit:Rui Wang, Institute of Automation, Chinese Academy of Sciences
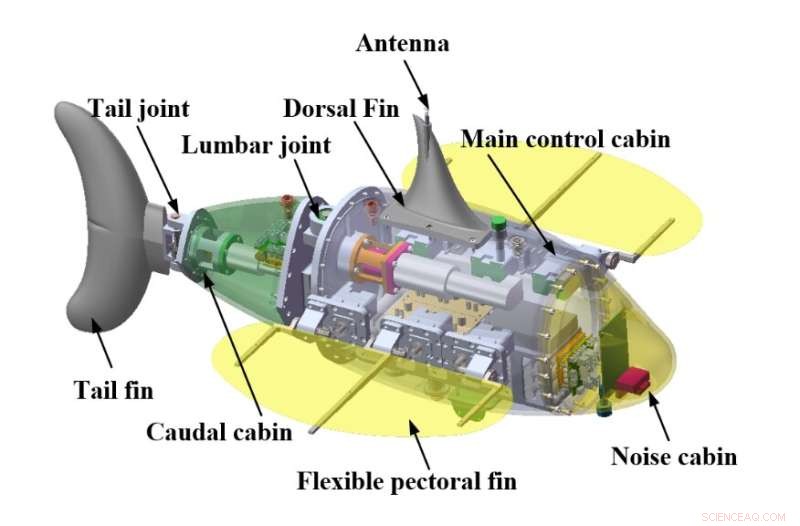
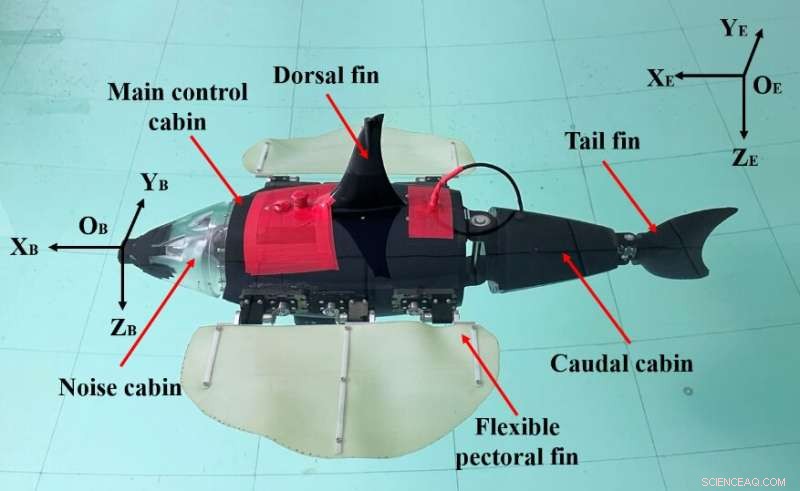
Undervattensrobotar används i stor utsträckning som verktyg i en mängd olika marina uppgifter. RobDact är ett sådant bioniskt undervattensfarkost, inspirerat av en fisk som heter Dactylopteridae känd för sina förstorade bröstfenor. Ett forskarlag har kombinerat beräkningsvätskedynamik och ett kraftmätningsexperiment för att studera RobDact och skapat en exakt hydrodynamisk modell av RobDact som gör det möjligt för dem att bättre kontrollera fordonet.
Teamet publicerade sina resultat i Cyborg and Bionic Systems den 31 maj 2022.
Undervattensrobotar används nu för många marina uppgifter, inklusive inom fiskeindustrin, undervattensutforskning och kartläggning. De flesta av de traditionella undervattensrobotarna drivs av en propeller, som är effektiv för att cruisa i öppet vatten med en stabil hastighet. Undervattensrobotar behöver dock ofta kunna röra sig eller sväva i låga hastigheter i turbulenta vatten, samtidigt som de utför en specifik uppgift. Det är svårt för propellern att flytta roboten under dessa förhållanden. En annan faktor när en undervattensrobot rör sig i låga hastigheter i instabila strömmande vatten är propellerns "ryckande" rörelse. Denna ryckning genererar oförutsägbara vätskepulser som minskar robotens effektivitet.
Under de senaste åren har forskare arbetat med att skapa undervattensrobotar som efterliknar levande varelser. Dessa bioniska fordon rör sig genom vattnet på samma sätt som fiskar eller mantor rör sig. Jämfört med traditionella undervattensfarkoster fungerar dessa bioniska undervattensfarkoster mer effektivt och robust i vattnet, samtidigt som de är miljövänliga.
Kredit:Rui Wang, Institute of Automation, Chinese Academy of Sciences
Undervattensrobotar påverkas av den omgivande vätskan när de rör sig genom vattnet. Detta fenomen kallas den hydrodynamiska effekten. När roboten rör sig i vattnet måste den hantera okänt vattenflöde och kraft, vilket kan orsaka onödiga förändringar i robotens position.
För att bättre kontrollera roboten behöver forskarna en mer exakt hydrodynamisk modell. Att skapa denna modell är vanligtvis mycket komplicerat och svårt. Dessutom är den verkliga undervattensmiljön föränderlig och svår att förutsäga, så modellparametrarna kan förändras med en förändring i miljön. Forskare har använt beräkningsvätskedynamik för att skapa hydrodynamiska modeller för undervattensrobotar.
Men modellerna som skapats med enbart beräkningsvätskedynamik är inte så exakta och praktiska som de behöver vara. För att övervinna denna utmaning försökte forskargruppen ett annat tillvägagångssätt. "För att göra den hydrodynamiska modellen mer exakt och praktisk kombinerade vi beräkningsvätskedynamiken och ett kraftmätningsexperiment", säger Rui Wang, forskare vid Institute of Automation, Chinese Academy of Sciences.
Kredit:Rui Wang, Institute of Automation, Chinese Academy of Sciences
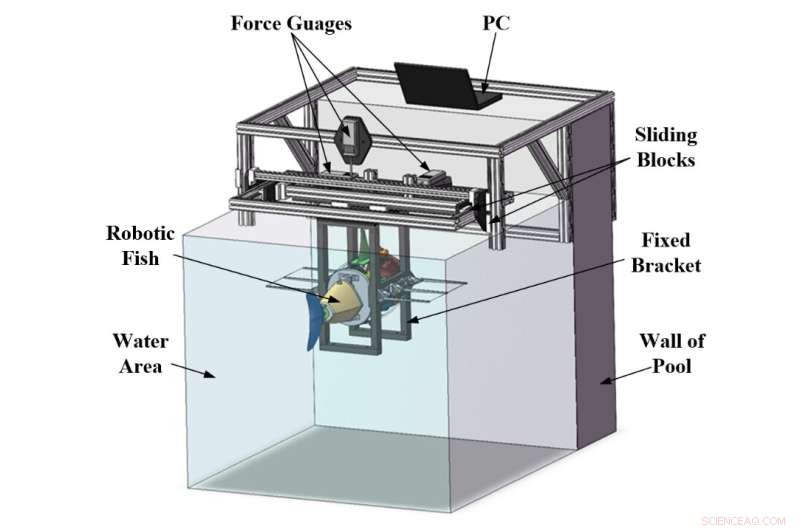
Med hjälp av beräkningsvätskedynamik identifierade forskarna parametrarna i den hydrodynamiska modellen. Sedan utvecklade de en kraftmätningsplattform för att få fram kraften som genereras av RobDact-fordonet. Med denna process kunde de få både den störande kraften och den kraft som genereras av RobDact i vilken komplex miljö som helst. "Detta kan hjälpa oss att få en bättre förståelse av undervattensfarkostens rörelsetillstånd och kontrollera undervattensfarkosten mer exakt", säger Qiyuan Cao, forskare vid Institute of Automation, Chinese Academy of Sciences.
Med sitt experiment kunde teamet bestämma den hydrodynamiska kraften hos RobDact vid olika hastigheter. Kraftmätningsplattformen de utvecklade gjorde det möjligt för dem att mäta kraften hos RobDact i X-, Y- och Z-riktningen. De etablerade ett kartläggningsförhållande mellan RobDacts fluktuationsparametrar och fordonets dragkraft genom sina kraftmätningsexperiment. Genom att slå samman RobDacts stela kroppsdynamiska modell med thrust mapping-modellen kunde forskarna utveckla en exakt och praktisk hydrodynamisk modell av RobDact i varierande rörelser.
Inför framtiden avser forskarna att studera den intelligenta styrningen av bioniska undervattensfarkoster med hjälp av den hydrodynamiska modellen i kombination med artificiell intelligensmetoder, såsom förstärkningsinlärning. "Det slutliga målet är att främja den praktiska tillämpningen av bioniska undervattensfarkoster i vattenmiljöövervakning och undervattenssökning och räddning", säger Wang. + Utforska vidare