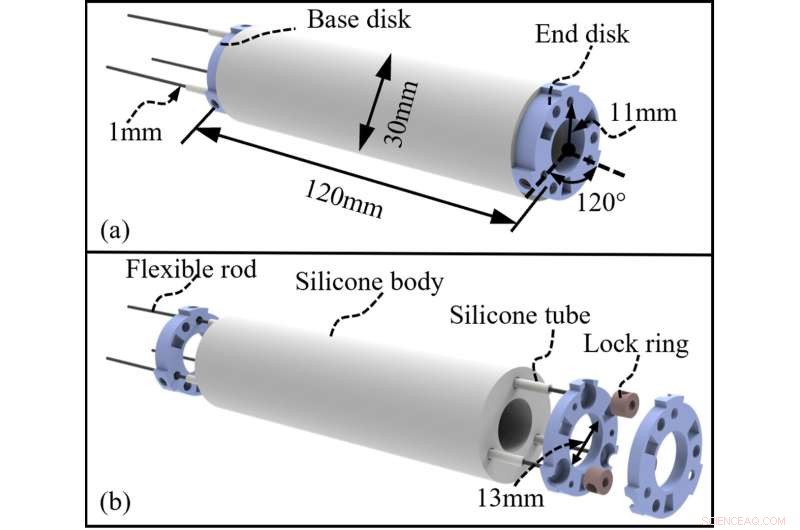
Struktur av den stångdrivna mjuka armen. (a) Designöversikt. (b) Sprängskiss. Kredit:Wang et al.
Mjuka robotar som kan utföra uppgifter med hög effektivitet, noggrannhet och precision kan ha många värdefulla tillämpningar. De skulle till exempel kunna introduceras i medicinska miljöer, hjälpa läkare att utföra komplexa kirurgiska ingrepp eller hjälpa äldre och utsatta patienter under rehabilitering.
Mjuka robotar är mer flexibla och kan deformeras mer. Detta kan resultera i en ökad fingerfärdighet (d.v.s. bättre manuella färdigheter när du slutför uppgifter), såväl som i en minskning av nyttolasten (d.v.s. robotens förmåga att bära en last), eftersom de kan producera mindre krafter än stela robotsystem
Forskare vid National University of Singapore och Beijing Jiaotong University har nyligen utvecklat en ny stavdriven mjuk robot (RDSR) som fungerar genom tryck- och dragrörelser. Denna robot, presenterad i en artikel publicerad i IEEE Robotics and Automation Letters , kombinerar mekanismerna i två robotsystem som tidigare skapats av medlemmar i forskargruppen.
"En välbalanserad prestanda när det gäller skicklighet, noggrannhet och nyttolast kan ha stor potential i mjuka robotapplikationer," sa Cecilia Laschi, en av forskarna som genomförde studien, till TechXplore. "Många studier fokuserar på detta område och ett fåtal verk och tidigare prestationer inspirerade oss. Till exempel, i en banbrytande forskning publicerad i Materials Science and Engineering, utvecklade vi en mjuk robot inspirerad av bläckfisken, driven av longitudinella och tvärgående senor, på liknande sätt till bläckfiskens muskler."
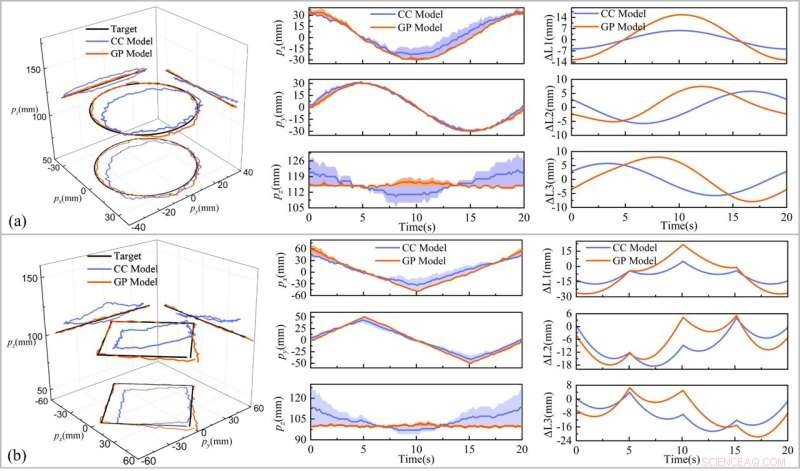
Bana spårning prestanda för öppen slinga styrning baserad på CC och GP modell. (a) Fall för cirkulär bana. (b) Fall för kvadratisk väg. Kredit:Wang et al.
Den tidigare roboten skapad av Laschi och hennes kollegor vid BioRobotics Institute of Scuola Superiore Sant'Anna i Italien kan efterlikna hur en bläckfisk rör sig genom att förlänga, förkorta och böja sina tentakler. Deras nyutvecklade system kan vara särskilt lovande för att slutföra uppdrag i trånga utrymmen, såsom städning eller utforskningar, komma åt djupa håligheter och ingripa inuti människokroppen.
"Den andra studien som inspirerade vårt senaste arbete var mitt forskarteams utveckling av en kontinuumrobot baserad på push-pull flexibla stavar," förklarade Peiyi Wang, en annan forskare som är involverad i studien. "Genom att kombinera den rena mjuka kroppen i vårt bläckfiskinspirerade system och den stavdrivna armen på Wangs robot, siktar vår nya robot på att uppnå en balanserad prestanda i rörelsenoggrannhet, arbetsyta, DOF, styvhet och aktiv uteffekt."
Den nya roboten som skapats av Laschi, Wang och deras kollegor består av en mjuk silikonkropp, en styv bas, ändskivor och tre kiselrör med vardera en flexibel Nitinol (NiTi)-baserad stav. Kiselkroppen, som är integrerad mellan basen och ändskivan, är mycket mjuk och flexibel, så den kan lätt förlängas, förkortas och böjas.
"Var och en av vårt systems flexibla stavar kan styras i både tryck- och dragriktningar, vilket skiljer sig från senor med endast dragverkan", sa Wang. "Den stavdrivna mjuka roboten (RDSR) kan sedan realisera flera rörelser i alla riktningar (flera DOF), genom koordinerad kontroll av tre push-pull stavar."
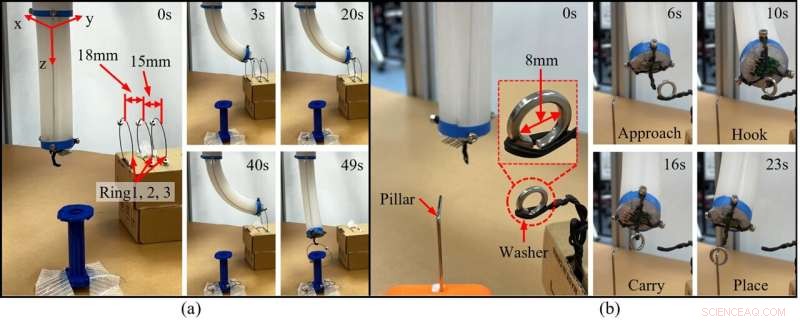
Objektmanipulationer utförda av vår mjuka robot. RDSR slutförde plocka-och-plats-uppgifter med stor arbetsyta exakt drift. (a) Objekten placerades nära arbetsytans gräns (uppgift 1). (b) Ett föremål med en liten diameter på 8 mm placerades (uppgift2). Kredit:Wang et al.
Forskarna utvärderade sin RDSR i en serie tester, och jämförde dess prestanda med den hos en silikonbaserad sendriven mjuk robot (TDSR). De fann att deras nya robotsystem var styvare och kunde fungera inom en bredare arbetsyta (från 2,6 till 5,2 gånger större).
I motsats till TDSR de jämförde den också, kunde deras robot aktivt applicera tryckande vinkelräta krafter på ett lutande plan, och kunde också utföra uppgifter som involverar objektmanipulation. Tillsammans tyder alla dessa fynd på att den nya roboten skulle kunna vara mer effektiv för att utföra uppgifter som innebär att plocka upp och placera föremål inom större utrymmen och med hög precision.
"Rörelsen som erhålls med dubbelriktad, push-pull aktivering är original," sa Laschi. "Det ger den mjuka roboten en mer exakt kontroll. En anmärkningsvärd implikation av vårt arbete är dess potential att möjliggöra balanserad prestanda när det gäller skicklighet, noggrannhet och nyttolast."
I framtiden kan det nya RDSR-systemet som skapats av detta team av forskare hjälpa till att tackla komplexa uppgifter mer effektivt och tillförlitligt och uppnå högre precisionsnivåer. I sina nästa studier skulle Laschi och hennes kollegor vilja testa robotarnas effektivitet för biomedicinska tillämpningar, inklusive kirurgi, rehabilitering och äldreomsorg.
"Vi planerar också att förbättra den mjuka arm som vi skapade på andra aspekter som inte är strikt relaterade till dess design och mekanik, utan till kontrollen av dess rörelser," tillade Laschi. "Att lägga till och modellera distribuerad proprioception, det vill säga uppfattningen av armens egen hållning, är en utmaning att ta itu med, såväl som ett robust avkänningssystem för att detektera kontaktkrafter." + Utforska vidare
© 2022 Science X Network