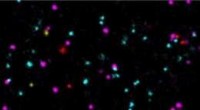
Väckningsstrukturen som lämnats efter av en simmande delfin producerad med hjälp av ett internt numeriskt ramverk med snabb gränselementmetod. Resultatet producerades av Lehigh doktorand Fatma Ayancik. Kredit:Lehigh University
Någon dag, undervattensrobotar kan efterlikna varelser som fiskar så nära att de kommer att lura inte bara de riktiga djuren själva utan också människor. Den förmågan skulle kunna ge information som sträcker sig från fiskbeståndens hälsa till var utländska vattenskotrar befinner sig.
Sådana robotar måste vara snabba, effektiv, mycket manövrerbar, och akustiskt smygande. Med andra ord, de måste vara mycket som flasknosdelfiner eller späckhuggare.
"Vi är intresserade av att utveckla nästa generation av undervattensfarkoster så vi försöker förstå hur delfiner och valar simmar lika effektivt som de gör, " säger Keith W. Moored, en biträdande professor i maskinteknik och mekanik vid Lehigh Universitys P.C. Rossin College of Engineering and Applied Science. "Vi studerar hur dessa djur är utformade och vad som är fördelaktigt med den designen när det gäller deras simningsprestanda, eller vätskemekaniken för hur de simmar. "
Moored är den främsta utredaren på ett papper som nyligen publicerats i Journal of the Royal Society Interface som undersökte vätskemekaniken för framdrivning av valar genom att numeriskt simulera deras oscillerande stjärtfenor. För första gången, Moore och hans team kunde utveckla en modell som kvantitativt kunde förutsäga hur fenens rörelser ska anpassas efter dess form för att maximera dess effektivitet. Forskningen var en del av ett större projekt som stöddes av Office of Naval Research under dess Multidisciplinary University Research Initiative-program. Projektet, som fick mer än 7 miljoner dollar i finansiering (med 1 miljon dollar till Lehigh) under mer än fem år, inkluderade också University of Virginia, West Chester University, Princeton Universitet, och Harvard University.
Stjärtfenorna hos valar (valar och delfiner) finns i en mängd olika former. Hur dessa djur flyttar sina fenor, eller deras kinematik, varierar också. Vissa valar kan flaxa sina fenor med en större amplitud, eller ställ dem i en brantare vinkel. Moored och hans team ville bättre förstå detta samspel mellan de två variablerna för att avgöra om svansfenans form var skräddarsydd för en specifik uppsättning kinematik.
Med hjälp av formen och kinematisk data för fem valarter (med vanliga namn på flasknosdelfin, fläckig delfin, späckhuggare, falsk späckhuggare, och vitval), de körde simuleringar på var och en av arterna för att bestämma dess framdrivningseffektivitet. Sedan bytte de om data, till exempel, köra en simulering av fenformen av en späckhuggare fäst vid en delfins kinematik.
"Vi körde 25 av dessa bytte simuleringar, och vi blev verkligen förvånade, " säger Moored. "Pseudospäckhuggarfenans form var alltid den bästa, vilket betyder att det var det mest effektiva. Det spelade ingen roll vilken kinematik vi gav den. Och vitvalens kinematik var alltid den bästa, oavsett vilken form den var fäst vid. Det hade vi inte förväntat oss, så vi började gräva mer i det och utvecklade denna relativt förenklade modell av hur effektivitet skalas med olika kinematiska och formvariabler."
Modellen fungerade bra för att fånga data som Moored och hans team redan hade genererat, så de utökade sin datauppsättning för att undersöka eventuella resulterande trender. De upptäckte att deras modell inte bara förutspådde effektivitet utöver deras datamängd utan också avslöjade att specifika former var skräddarsydda för specifik kinematik.
En intressant uppenbarelse, säger Moored, var det grundläggande samspelet mellan cirkulationskrafter och tillagda masskrafter som bidrar till ett djurs rörelse. Cirkulationskrafter är de som genererar lyft, som med flygplan.
"En svans som flaxar upp och ner genererar krafter precis som ett flygplan, men det genererar också extra masskrafter som har att göra med hur snabbt vätskan accelereras, " säger Moored. "Förr, människor trodde inte att de extra massstyrkorna var så relevanta vid simning av valar. Det är inte alls erkänt i den tidigare litteraturen. Men vi fann att finnens accelerationer är en integrerad del av att förutsäga effektivitetstrender, och det var fascinerande för oss. Det ger oss i slutändan en prediktiv modell som är korrekt. Utan det, vi skulle i princip säga att fenformen inte förändrar effektiviteten, och det är inte sant."
Att ha en modell som kan förutsäga prestanda baserat på form och kinematik ger en grundläggande designekvation av olika slag för att bygga en undervattensrobot som fungerar som en val. Hittills, dessa ekvationer har inte funnits. Och potentialen för dessa maskiner är enorm. Snabb, effektiv, och mycket manövrerbara fiskformade robotar kan hjälpa forskare att testa hypoteser om hur djuren simmar, och bättre förstå fiskeskolornas beteende. De skulle kunna användas för att upptäcka ubåtar och andra undervattensfarkoster. De skulle också kunna användas för att övervaka klimatförändringarnas inverkan på fiskbestånden.
Moored och hans team har redan gått vidare och utökat sin skalningsmodell för att ta hänsyn till ett större utbud av variabler som de sedan validerade med experimentella data. I sista hand, de vill bygga en mycket mer förutsägbar modell. En som fångar effekterna av dessa variabler, och kan sedan förutsäga prestanda för en rad applikationer.
"Problemet med att simma fisk är ett riktigt spännande problem eftersom det är så komplicerat, " säger han. "Det är fascinerande att ta detta kaos av variabler och se ordning i det, att se strukturen i den, och att förstå vad som i grunden händer."