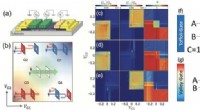
Modellen för binokulär stereoseende. Kredit:Optics Express (2022). DOI:10.1364/OE.470391
Platsbaserade tjänster blir allt viktigare i inomhusmiljöer med utvecklingen av Internet-of-thing (IoT)-teknologier. Systemet för positionering av synligt ljus (VLP) erbjuder stor potential på grund av dess immunitet mot radiofrekvensinducerad elektromagnetisk störning, ett fritt och obegränsat spektrum och en mycket högre säkerhetsnivå.
På senare tid har en hel del forskningsarbete om siktlinje (LOS) VLP påvisats med hög noggrannhet till mycket låga kostnader. Men för LOS VLP är blockering och skuggning ett stort problem; och det finns krav på ett stort antal lysdioder. Få metoder för att lösa detta problem har undersökts.
I en studie publicerad i Optics Express , Dr. Lin Bangjiangs grupp från Fujian Institute of Research on the Structure of Matter vid den kinesiska vetenskapsakademin föreslog ett VLP-system utan siktlinje (NLOS) som använder en kikarekamera och en enda lysdiod (LED) . Den kan realisera 3D-högprecisionspositionering av en godtycklig kroppsställning av det reflekterade ljuset från golvet.
Forskarna föreslog en systemmodell som består av två funktionsmoduler:en NLOS optisk kamerakommunikationsmodul (OCC) och en binokulär stereoseendemodul. Den förra använder reflektionerna för att ta emot koordinatinformationen för lysdioden genom en förbättrad OCC-signalåterställningsmodell. Och den senare uppskattar kamerans position genom en föreslagen binokulär positionsuppskattningsalgoritm, som är baserad på principerna för binokulär stereoseende.
De föreslog sedan en felkompensationsalgoritm för att optimera systemets fel på z-axeln, vilket är huvudproblemet med djupuppskattning för kikarkameran att felet på z-axeln är mycket större än det på x och y yxor.
Dessutom designade forskarna en experimentell testbädd och valde en STM32 mikrokontrollerenhet för att driva en lysdiod. Vid mottagaren använde de en kikarekamera för att fånga det reflekterade ljuset från marken vid två olika exponeringslägen (ett långt och ett kort).
De fick LED-positionen av NLOS OCC-modulen med den korta exponeringsbilden och fick pixelkoordinaterna för projektionen av LED:n reflekterade av marken i den långa exponeringsbilden. En tröghetsmätenhet är fixerad tillsammans med kikarekameran för att mäta dess ställning.
Med hjälp av denna information beräknade forskarna felet mellan uppskattningsvärdet och det uppmätta värdet av kamerans position.
Denna studie övervinner utmaningen med skuggning/blockering av LOS-länkarna, realiserar 3D-arbiträr attitydpositionering med det minsta antalet beacons (endast en enda lysdiod), och förbättrar avsevärt användbarheten av VLP. + Utforska vidare