Tack vare sensorer och konstgjorda muskler på mikroskalan, framtida mikroelektronik kommer att kunna anta komplexa former och skapa bioneurala gränssnitt med känslig biologisk vävnad utan att orsaka skada. Kredit:IFW Dresden/Chemnitz tekniska universitet
Flexibel och adaptiv mikroelektronik anses vara en drivkraft för innovation för nya och mer effektiva biomedicinska tillämpningar. Dessa inkluderar, till exempel, behandling av skadade nervknippen, kronisk smärta, eller kontroll av konstgjorda lemmar. För att detta ska fungera, nära kontakt mellan elektronik och neural vävnad är avgörande för effektiv elektrisk och mekanisk koppling. Dessutom, potentiella tillämpningar uppstår från produktionen av små och flexibla kirurgiska verktyg.
Ett internationellt team ledd av prof. Dr. Oliver G. Schmidt, chef för Institutet för integrerande nanovetenskaper vid Leibniz Institute for Solid State and Materials Research (IFW) Dresden och innehavare av professuren för material för nanoelektronik vid Chemnitz tekniska universitet och initiativtagare till Center for Materials, Arkitektur och integration av nanomembran (MAIN), liksom Boris Rivkin, en Ph.D. student i prof. Schmidts grupp, har nu för första gången visat att sådan adaptiv mikroelektronik kan positionera sig på ett kontrollerat sätt, manipulera biologisk vävnad, och reagerar på sin omgivning genom att analysera sensorsignaler. Resultaten, med Rivkin som första författare, har dykt upp i tidningen Avancerade intelligenta system . Olika egenskaper för dynamiska processer kombineras för första gången i adaptiv mikroelektronik
Tills nu, det har inte varit möjligt för mikroelektroniska strukturer att både känna av och anpassa sig till sin omgivning. Även om det finns strukturer med en töjningssensor som övervakar sin egen form, mikroelektronik med magnetiska sensorer som orienterar sig i rymden, eller enheter vars rörelse kan styras av elektroaktiva polymerstrukturer, en kombination av dessa egenskaper för tillämpning i en dynamiskt föränderlig organism på mikrometerskala, d.v.s. långt under en millimeter, har inte rapporterats hittills.Adaptiv och intelligent mikroelektronik
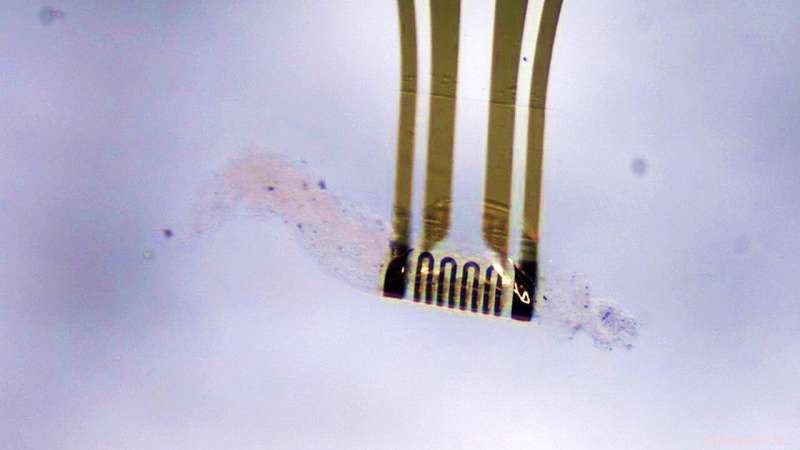
Kärnan i dessa applikationer är en polymerfilm, bara 0,5 mm bred och 0,35 mm lång, som fungerar som en bärare för de mikroelektroniska komponenterna. Som jämförelse, en 1-centsbit har en diameter på cirka 16 mm. I deras publikation, teamet från Chemnitz University of Technology och Leibniz IFW i Dresden presenterar nu adaptiv och intelligent mikroelektronik som använder mikroskopiska konstgjorda muskler för att omforma och anpassa sig till dynamiska miljöer tack vare feedback från lämpliga sensorer.
Sensorsignalerna matas genom elektriska anslutningar till en mikrokontroller, där de utvärderas och används för att generera kontrollsignaler för de konstgjorda musklerna. Detta gör att dessa miniatyrverktyg kan anpassa sig till komplexa och oförutsägbara anatomiska former. Till exempel, nervknippen har alltid olika storlekar. Adaptiv mikroelektronik kan försiktigt omsluta dessa nervknippen för att etablera ett lämpligt bioneuralt gränssnitt.
Väsentligt för detta är integrationen av form- eller positionssensorer i kombination med mikroaktuatorer. Adaptiv mikroelektronik tillverkas därför i en så kallad "monolitisk process i wafer-skala". "Wafers" är platta substrat gjorda av kisel eller glas som kretsarna är tillverkade på. Monolitisk produktion gör att många komponenter kan tillverkas samtidigt parallellt på ett substrat. Detta möjliggör snabb och samtidigt mer kostnadseffektiv produktion. Konstgjorda muskler genererar rörelse—användning i organisk miljö möjlig
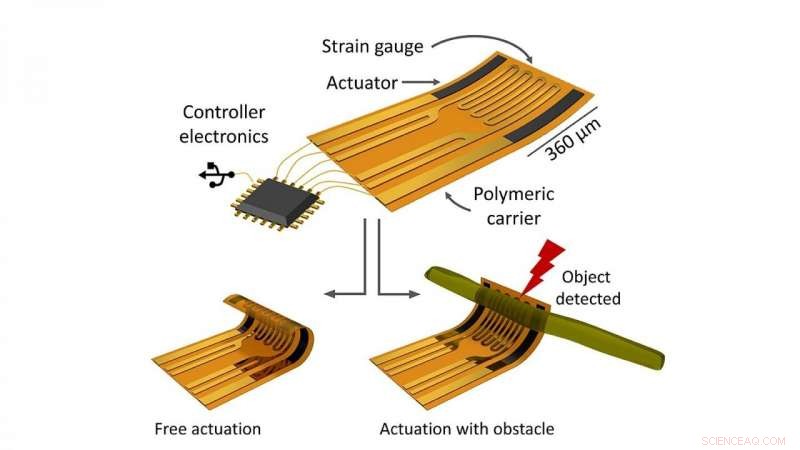
Polymerfilmen som utvecklats av forskargruppen från Chemnitz och Dresden är bara 0,5 mm bred och 0,35 mm lång. Den fungerar som en bärare för de mikroelektroniska komponenterna och är utrustad med såväl konstgjorda muskler som sensorer. Detta gör det möjligt för den att uppfatta sin omgivning, känna igen föremål, och anpassa sig till olika former. Kredit:IFW Dresden/Chemnitz tekniska universitet
Rörelsen och omformningen av adaptiv mikroelektronik uppnås med hjälp av konstgjorda muskler, de så kallade "aktuatorerna". Dessa genererar rörelse genom att stöta ut eller absorbera joner och kan på så sätt omforma polymerfilmen.
Denna process är baserad på användningen av polymeren polypyrrol (PPy). Fördelen med denna metod är att manipulering av formen kan utföras på ett målinriktat sätt och med redan mycket låg elektrisk förspänning (mindre än en volt). Det faktum att konstgjorda muskler också är säkra för användning i organiska miljöer har redan visat sig av andra grupper tidigare. Detta innebar att testa mikromaskinernas prestanda i olika miljöer som är relevanta för medicinska tillämpningar, inklusive cerebrospinalvätska, blod, plasma, och urin.
Går för ännu mer komplexa mikroelektroniska robotar i framtiden
Teamet från Dresden och Chemnitz förväntar sig att adaptiv och intelligent mikroelektronik kommer att utvecklas till komplexa robotmikrosystem på medellång sikt. Boris Rivkin säger:"Det avgörande nästa steget är övergången från den tidigare platta arkitekturen till tredimensionella mikrorobotar. Tidigare arbete har visat hur platta polymerfilmer kan omformas till tredimensionella strukturer genom självorganiserad vikning eller rullning. Vi kommer att lägga till adaptiv elektronik till sådana material för att utveckla system som robotmikrokatetrar, små robotarmar, och formbara neurala implantat som verkar semi-autonomt efter en digital instruktion."
Dr Daniil Karnaushenko, gruppledare i prof. Oliver Schmidts team, lägger till, "Sådana komplexa mikrorobotar kommer att kräva ett stort antal individuella ställdon och sensorer. Att effektivt inrymma och använda elektroniska komponenter i en sådan täthet är en utmaning eftersom det behövs fler elektriska anslutningar än vad som finns tillgängligt. Detta kommer att lösas av komplexa elektroniska kretsar som kommer att integreras i adaptiv mikroelektronik i framtiden för att skicka lämpliga instruktioner till rätt komponenter."
Detta arbete bidrar också till det framväxande området robotassisterad kirurgi, vilket skulle kunna möjliggöra mindre invasiva men mer exakta procedurer. Smarta kirurgiska verktyg som genererar tillförlitlig feedback om sin form och position kan bli oumbärliga vid behandling av ömtålig vävnad.