Hallå, robotar kan spela fångst. Roboten Justin, ett humanoidt system med två armar, utvecklad av den tyska luft- och rymdbyrån, Deutsches Zentrum fur Luft- und Raumfahrt, kan utföra givna uppgifter självständigt som att fånga bollar eller servera kaffe. Se fler robotbilder. © Michael Dalder/Reuters/Corbis
Hallå, robotar kan spela fångst. Roboten Justin, ett humanoidt system med två armar, utvecklad av den tyska luft- och rymdbyrån, Deutsches Zentrum fur Luft- und Raumfahrt, kan utföra givna uppgifter självständigt som att fånga bollar eller servera kaffe. Se fler robotbilder. © Michael Dalder/Reuters/Corbis Att vara människa är mycket lättare än att bygga en människa.
Ta något så enkelt som att spela fångst med en vän på gården. När du bryter ner denna aktivitet till de diskreta biologiska funktioner som krävs för att utföra den, det är inte alls enkelt. Du behöver sensorer, sändare och effektorer. Du måste beräkna hur svårt du ska kasta utifrån avståndet mellan dig och din följeslagare. Du måste ta hänsyn till solbländning, vindhastighet och distraktioner i närheten. Du måste bestämma hur starkt du ska hålla tag i bollen och när du ska klämma vantet under en fångst. Och du måste kunna bearbeta ett antal vad-om-scenarier:Vad händer om bollen går över mitt huvud? Vad händer om det rullar in på gatan? Vad händer om det kraschar genom min grannes fönster?
Dessa frågor visar några av de mest angelägna utmaningarna inom robotik, och de satte scenen för vår nedräkning. Vi har sammanställt en lista över de 10 svåraste sakerna att lära robotar ordnade ungefär från "lättaste" till "svåraste" - tio saker vi kommer att behöva erövra om vi någonsin ska förverkliga de löften som Bradbury gett, Kuk, Asimov, Clarke och alla andra berättare som har föreställt sig en värld där maskiner beter sig som människor.
Innehåll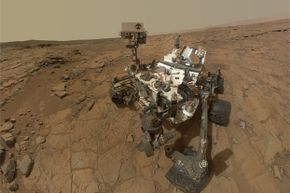 Det ultimata navigeringstestet för en robot:Mars! Än så länge, Nyfikenhet har visat sig ganska skicklig. Bild med tillstånd av NASA/JPL-Caltech/MSSS
Det ultimata navigeringstestet för en robot:Mars! Än så länge, Nyfikenhet har visat sig ganska skicklig. Bild med tillstånd av NASA/JPL-Caltech/MSSS Att flytta från punkt A till punkt B låter så enkelt. Vi människor gör det hela dagen, varje dag. För en robot, fastän, navigering - särskilt genom en enda miljö som ständigt förändras eller bland miljöer som den aldrig har stött på tidigare - kan vara en knepig affär. Först, roboten måste kunna uppfatta sin omgivning, och då måste den kunna förstå inkommande data.
Robotiker tar itu med den första frågan genom att beväpna sina maskiner med en rad sensorer, skannrar, kameror och andra högteknologiska verktyg för att bedöma sin omgivning. Laserskannrar har blivit alltmer populära, även om de inte kan användas i vattenmiljöer eftersom vatten tenderar att störa ljuset och dramatiskt minskar sensorns räckvidd. Ekolodstekniken erbjuder ett livskraftigt alternativ i undervattensrobotar, men i landbaserade applikationer, det är mycket mindre exakt. Och, självklart, ett vision system som består av en uppsättning integrerade stereoskopiska kameror kan hjälpa en robot att "se" sitt landskap.
Att samla in data om miljön är bara halva striden. Den större utmaningen handlar om att bearbeta dessa uppgifter och använda dem för att fatta beslut. Många forskare får sina robotar att navigera genom att använda en förspecificerad karta eller konstruera en karta i farten. Inom robotik, detta är känt som SLAM - samtidig lokalisering och kartläggning . Kartläggning beskriver hur en robot konverterar information som samlats in med sina sensorer till en given representation. Lokalisering beskriver hur en robot positionerar sig i förhållande till kartan. I praktiken, dessa två processer måste ske samtidigt, skapa en kyckling-och-ägg-gåta som forskare har kunnat övervinna med kraftfullare datorer och avancerade algoritmer som beräknar position baserat på sannolikheter.
 Twendy-One, en robot som syftar till att hjälpa äldre och funktionshindrade runt huset, visar sin förmåga att hålla känsliga föremål genom att manipulera ett sugrör mellan fingrarna på Waseda University i Tokyo den 8 januari, 2009. © Issei Kato/Reuters/Corbis
Twendy-One, en robot som syftar till att hjälpa äldre och funktionshindrade runt huset, visar sin förmåga att hålla känsliga föremål genom att manipulera ett sugrör mellan fingrarna på Waseda University i Tokyo den 8 januari, 2009. © Issei Kato/Reuters/Corbis Robotar har plockat upp paket och delar i fabriker och lager i åratal. Men de undviker i allmänhet människor i dessa situationer, och de fungerar nästan alltid med konsekvent formade föremål i röriga miljöer. Livet är mycket mindre strukturerat för alla robotar som vågar sig bortom fabriksgolvet. Om en sådan maskin någonsin hoppas kunna arbeta i hem eller sjukhus, det kommer att behöva en avancerad beröringskänsla som kan upptäcka närliggande människor och cherryplocka ett objekt från en snygg samling av saker.
Det är svåra färdigheter för en robot att lära sig. Traditionellt, forskare undvek beröring helt, programmera sina maskiner att misslyckas om de tog kontakt med ett annat objekt. Men under de senaste fem åren eller så, det har skett betydande framsteg inom kompatibla mönster och konstgjord hud. Efterlevnad avser en robots flexibilitet. Mycket flexibla maskiner är mer kompatibla; stela maskiner är mindre så.
Under 2013, Georgia Tech -forskare byggde en robotarm med fjädrar för leder, vilket gör att tillägget kan böja och interagera med sin miljö mer som en mänsklig arm. Nästa, de täckte det hela i "hud" som kunde känna tryck eller beröring. Vissa robotskinn innehåller förreglande sexkantiga kretskort, var och en bär infraröda sensorer som kan upptäcka allt som kommer närmare än en centimeter. Andra är utrustade med elektroniska "fingeravtryck" - upphöjda och kantade ytor som förbättrar greppet och underlättar signalbehandling.
Kombinera dessa högteknologiska armar med förbättrade synsystem, och du får en robot som kan erbjuda en öm smekning eller nå in i skåp för att välja ett objekt från en större samling.
 Mekatronikingenjör Ben Schaefer interagerar med humanoid robot bartender Carl när den förbereder en drink på Robots Bar and Lounge i Tyskland den 26 juli, 2013. Utvecklad av Schaefer, Carl kan också interagera med kunder i små konversationer. © Fabrizio Bensch/Reuters/Corbis
Mekatronikingenjör Ben Schaefer interagerar med humanoid robot bartender Carl när den förbereder en drink på Robots Bar and Lounge i Tyskland den 26 juli, 2013. Utvecklad av Schaefer, Carl kan också interagera med kunder i små konversationer. © Fabrizio Bensch/Reuters/Corbis Alan M. Turing, en av grundarna till datavetenskap, gjorde en djärv förutsägelse 1950:Maskiner skulle en dag kunna tala så flytande att vi inte skulle kunna skilja dem från människor. Ack, robotar (även Siri) har inte levt upp till Turings förväntningar - ännu. Det beror på att taligenkänning är mycket annorlunda än naturlig språkbehandling - vad våra hjärnor gör för att extrahera mening från ord och meningar under en konversation.
Initialt, forskare trodde att det skulle vara så enkelt som att ansluta grammatikreglerna till en maskins minnesbanker. Men hårdkodning av en grammatisk primer för ett visst språk har visat sig vara omöjligt. Även att tillhandahålla regler kring betydelsen av enskilda ord har gjort språkinlärning till en skrämmande uppgift. Behöver du ett exempel? Tänk "nytt" och "visste" eller "bank" (en plats att lägga pengar) och "bank" (sidan av en flod). Det visar sig att människor förstår dessa språkliga särdrag genom att förlita sig på mentala förmågor som utvecklats över många, många år av utveckling, och forskare har inte kunnat bryta ner dessa möjligheter till diskreta, identifierbara regler.
Som ett resultat, många robotar idag bygger sin språkbehandling på statistik. Forskare matar dem stora samlingar av text, känd som en korpus , och låt sedan deras datorer bryta ner den längre texten i bitar för att ta reda på vilka ord som ofta kommer ihop och i vilken ordning. Detta gör att roboten kan ”lära sig” ett språk baserat på statistisk analys. Till exempel, till en robot, ordet "fladdermus" åtföljd av ordet "fluga" eller "vinge" syftar på det flygande däggdjuret, medan "fladdermus" följt av "boll" eller "handske" avser lagsporten.
 En robot visar sina skrivkunskaper under en tävling av intelligenta robotar som skapades av studenter vid Kinas Anhui University of Science and Technology den 16 november, 2012. © Chen Bin/Xinhua Press/Corbis
En robot visar sina skrivkunskaper under en tävling av intelligenta robotar som skapades av studenter vid Kinas Anhui University of Science and Technology den 16 november, 2012. © Chen Bin/Xinhua Press/Corbis Låt oss säga att någon som aldrig har spelat golf vill lära sig att svänga en klubba. Han kunde läsa en bok om det och sedan prova det, eller han kunde se en praktiserad golfare gå igenom rätt rörelser, ett snabbare och enklare sätt att lära sig det nya beteendet.
Robotiker står inför ett liknande dilemma när de försöker bygga en autonom maskin som kan lära sig nya färdigheter. Ett tillvägagångssätt, som med golfexemplet, är att bryta ner en aktivitet i exakta steg och sedan programmera informationen i robotens hjärna. Detta förutsätter att varje aspekt av aktiviteten kan dissekeras, beskrivs och kodas, som, som det visar sig, är inte alltid lätt att göra. Det finns vissa aspekter av att svänga en golfklubb, till exempel, som förmodligen inte kan beskrivas, som samspelet mellan handled och armbåge. Dessa subtila detaljer kan kommuniceras mycket lättare genom att visa snarare än att berätta.
Under de senaste åren har forskare har haft viss framgång med att lära robotar att efterlikna en mänsklig operatör. De kallar detta imitation lärande eller lära av demonstration ( LfD ), och de drar av den genom att beväpna sina maskiner med matriser med vidvinkel- och zoomkameror. Denna utrustning gör att roboten kan "se" en mänsklig lärare som utför en specifik process eller aktivitet. Inlärningsalgoritmer bearbetar sedan dessa data för att producera en matematisk funktionskarta som ansluter visuell input till önskade handlingar. Självklart, robotar i LfD -scenarier måste kunna ignorera vissa aspekter av lärarens beteende - som att klia en klåda - och hantera korrespondensproblem, som hänvisar till sätt som en robots anatomi skiljer sig från en människas.
Ekorrar utövas inom bedrägeriets konst, så forskare har vänt sig till dessa galna gnagare för några idéer om hur man lär robotar vilseledande beteende. John Foxx/Stockbyte/Thinkstock Den fina konsten att bedra har utvecklats för att hjälpa djur att få ett ben upp på sina konkurrenter och undvika att bli uppätna av rovdjur. Med övning, färdigheten kan bli en mycket effektiv överlevnadsmekanism.
För robotar, att lära sig att lura en person eller en annan robot har varit utmanande (och det kan vara bra för dig). Bedrägeri kräver fantasi - förmågan att bilda idéer eller bilder av externa föremål som inte är närvarande för sinnena - vilket typiskt saknar maskiner (se nästa objekt på vår lista). De är bra på att bearbeta direkt input från sensorer, kameror och skannrar, men inte så bra på att bilda begrepp som existerar bortom alla dessa sensoriska data.
Framtida robotar kan dock vara bättre insatta i knep. Georgia Tech -forskare har kunnat överföra några bedrägliga färdigheter hos ekorrar till robotar i deras labb. Först, de studerade de luddiga gnagarna, som skyddar deras cacher av begravd mat genom att leda konkurrenter till gamla, oanvända cacher. Sedan kodade de dessa beteenden till enkla regler och laddade dem i hjärnan hos sina robotar. Maskinerna kunde använda algoritmerna för att avgöra om bedrägeri kan vara användbart i en given situation. Om så är fallet, de kunde sedan tillhandahålla en falsk kommunikation som ledde en följeslagare från sin gömställe.
 Om människor kommer att spendera mycket tid med robotar, som denna humanoid som kallas ROBOY, maskinerna måste bli lite bättre på att förutsäga vad till synes oförutsägbara människor kommer att göra härnäst. © Erik Tham/Corbis
Om människor kommer att spendera mycket tid med robotar, som denna humanoid som kallas ROBOY, maskinerna måste bli lite bättre på att förutsäga vad till synes oförutsägbara människor kommer att göra härnäst. © Erik Tham/Corbis På "The Jetsons, "Rosie robotpiga kunde föra samtal, laga måltider, städa huset och tillgodose behoven och behoven hos George, Jane, Judy och Elroy. För att förstå Rosies avancerade utveckling, betrakta denna scen från det första avsnittet av säsong ett:Mr. Spacely, Georges chef, kommer till Jetson -huset för middag. Efter måltiden, Mr Spacely tar fram en cigarr och lägger den i munnen, vilket får Rosie att rusa över med en tändare. Denna enkla handling representerar ett komplext mänskligt beteende - förmågan att förutse vad som kommer nästa baserat på vad som just hände.
Som bedrägeri, att förutse mänsklig handling kräver att en robot föreställer sig ett framtida tillstånd. Det måste kunna säga, "Om jag observerar en människa som gör x, då kan jag förvänta mig, baserat på tidigare erfarenhet, att hon sannolikt kommer att följa upp det med y. "Detta har varit en allvarlig utmaning inom robotik, men människor gör framsteg. Vid Cornell University, ett team har arbetat med att utveckla en autonom robot som kan reagera utifrån hur en följeslagare interagerar med objekt i miljön. För att åstadkomma detta, roboten använder ett par 3D-kameror för att få en bild av omgivningen. Nästa, en algoritm identifierar nyckelobjekten i rummet och isolerar dem från bakgrunden. Sedan, använder en mängd information som samlats in från tidigare träningspass, roboten genererar en uppsättning troliga förväntningar baserat på rörelsen hos personen och föremålen hon rör vid. Roboten gissar bäst vad som kommer att hända och agerar därefter.
Cornell -robotarna gissar fortfarande fel någon gång, men de gör stadiga framsteg, särskilt när kameratekniken förbättras.
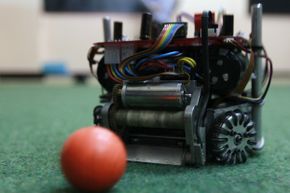 Närbild av en medlem av Colombias robotfotbollslag. En av RoboCup -fotbollsligorna har flera helt autonoma robotar som arbetar tillsammans för att spela sporten. En annan liga har humanoida robotar! © John Vizcaino/Reuters/Corbis
Närbild av en medlem av Colombias robotfotbollslag. En av RoboCup -fotbollsligorna har flera helt autonoma robotar som arbetar tillsammans för att spela sporten. En annan liga har humanoida robotar! © John Vizcaino/Reuters/Corbis Att bygga en enda, storskalig maskin-en android, om du vill - kräver betydande investeringar i tid, energi och pengar. Ett annat tillvägagångssätt innebär att man sätter in en armé av mindre, enklare robotar som sedan arbetar tillsammans för att utföra mer komplexa uppgifter.
Detta medför en annan uppsättning utmaningar. En robot som arbetar inom ett team måste kunna positionera sig exakt i förhållande till lagkamrater och måste kunna kommunicera effektivt - med andra maskiner och med mänskliga operatörer. För att lösa dessa problem, forskare har vänt sig till insektsvärlden, som uppvisar komplext svärmande beteende för att hitta mat och slutföra uppgifter som gynnar hela kolonin. Till exempel, genom att studera myror, forskare vet att individer använder feromoner för att kommunicera med varandra.
Robotar kan använda samma "feromonlogik, "även om de litar på ljus, inte kemikalier, att kommunicera. Det fungerar så här:En grupp små bots sprids i ett begränsat område. I början, de utforskar området slumpmässigt tills en individ kommer över ett spår av ljus som lämnats av en annan bot. Det vet att följa spåret och gör det, lämnar sitt eget ljusspår som det går. När leden förstärks, fler och fler robotar hittar det och går med i vagnståget. Vissa forskare har också funnit framgångar med hjälp av hörbara kvitter. Ljud kan användas för att se till att enskilda robotar inte vandrar för långt bort eller för att locka lagkamrater till ett intressant föremål.
 En hydra visar upp sin självreplikerande förmåga, en som vissa robotister inte skulle ha något emot att införliva i sina maskiner. luismmolina/iStock/Thinkstock
En hydra visar upp sin självreplikerande förmåga, en som vissa robotister inte skulle ha något emot att införliva i sina maskiner. luismmolina/iStock/Thinkstock Gud sa till Adam och Eva:"Var fruktsam och förök dig, och fylla på jorden. "En robot som fick samma kommando skulle känna sig antingen flummoxed eller frustrerad. Varför? Eftersom självreplikation har visat sig gäckande. Det är en sak att bygga en robot-det är en helt annan sak att bygga en robot som kan göra kopior av sig själv eller återskapa förlorade eller skadade komponenter.
Intressant, robotar kanske inte ser på människor som reproduktiva förebilder. Kanske har du märkt att vi faktiskt inte delar upp i två identiska bitar. Enkla djur, dock, gör detta hela tiden. Släktingar till maneter som kallas hydra utövar en form av asexuell reproduktion som kallas gryende :En liten säckballong utåt från förälderns kropp och bryts sedan av för att bli en ny, genetiskt identiska individer.
Forskare arbetar med robotar som kan utföra detta grundläggande kloningsförfarande. Många av dessa robotar är byggda av upprepande element, vanligtvis kuber, som innehåller identiska maskiner och programmet för självreplikation. Kuberna har magneter på sina ytor så att de kan fästa på och lossa från andra kuber i närheten. Och varje kub är uppdelad i två bitar längs en diagonal så att varje halva kan vridas oberoende. En komplett robot, sedan, består av flera kuber arrangerade i en specifik konfiguration. Så länge det finns tillgång till kuber, en enda robot kan böja sig, ta bort kuber från sin "kropp" för att fröa en ny maskin och plocka sedan upp byggstenar från förvaringen tills två fullformade robotar står sida vid sida.
 Om du bygger dödliga autonoma robotar som inte kräver mänskliga operatörer, hur exakt skulle du programmera etik? © Fang Zhe/Xinhua Press/Corbis
Om du bygger dödliga autonoma robotar som inte kräver mänskliga operatörer, hur exakt skulle du programmera etik? © Fang Zhe/Xinhua Press/Corbis När vi interagerar med människor hela dagen, vi fattar hundratals beslut. I var och en, vi väger våra val mot vad som är rätt och fel, vad som är rättvist och orättvist. Om vi vill att robotar ska bete sig som oss, de behöver förståelse för etik.
Som språk, kodning av etiskt beteende är en enorm utmaning, främst för att det inte finns en allmän uppsättning universellt accepterade etiska principer. Olika kulturer har olika uppföranderegler och olika lagar. Även inom kulturer, regionala skillnader kan påverka hur människor utvärderar och mäter sina handlingar och deras omgivningars handlingar. Att försöka skriva en globalt relevant etikmanual kan robotar använda som inlärningsverktyg skulle vara praktiskt taget omöjligt.
Med det sagt, forskare har nyligen kunnat bygga etiska robotar genom att begränsa problemets omfattning. Till exempel, en maskin begränsad till en specifik miljö - ett kök, säga, eller ett patientrum i en assistansanläggning - skulle ha mycket färre regler att lära sig och skulle ha rimlig framgång med att ta etiskt sunda beslut. För att åstadkomma detta, robotingenjörer lägger in information om val som anses vara etiska i utvalda fall i en maskininlärningsalgoritm. Valen bygger på tre kriterier i glidskalan:hur mycket bra en handling skulle resultera i, hur mycket skada det skulle förhindra och ett mått av rättvisa. Algoritmen matar sedan ut en etisk princip som kan användas av roboten när den fattar beslut. Med denna typ av artificiell intelligens, din framtids hushållsrobot kommer att kunna avgöra vem i familjen som ska diska och vem som får styra TV -fjärrkontrollen för natten.
Tillsammans med hans känslomässiga förmågor, Nao vet tydligt hur man ska kyla. © Gerd Roth/dpa/Corbis "De bästa och vackraste sakerna i världen kan inte ses eller ens beröras. De måste kännas med hjärtat." Om denna observation av Helen Keller är sann, då skulle robotar vara avsedda att missa det bästa och vackraste. Trots allt, de är bra på att känna världen runt dem, men de kan inte förvandla dessa sensoriska data till specifika känslor. De kan inte se en älskades leende och känna glädje, eller spela in en skuggig främlings grimas och darra av rädsla.
Detta, mer än någonting på vår lista, kan vara det som skiljer människan från maskinen. Hur kan du lära en robot att bli kär? Hur kan du programmera frustration, avsky, förvåning eller synd? Är det ens värt att prova?
Vissa forskare tycker det. De tror att framtida robotar kommer att integrera både kognitiva känselsystem, och det, som ett resultat, de kommer att kunna fungera bättre, lära sig snabbare och interagera mer effektivt med människor. Tro det eller ej, Det finns redan prototyper som uttrycker ett begränsat antal mänskliga känslor. Nao, en robot utvecklad av ett europeiskt forskargrupp, har ett 1-årigt barns affektiva egenskaper. Det kan visa lycka, ilska, rädsla och stolthet, allt genom att kombinera hållningar med gester. Dessa visningsåtgärder, härrörande från studier av schimpanser och spädbarn, är programmerade till Nao, men roboten bestämmer vilken känsla som ska visas baserat på dess interaktion med närliggande människor och föremål. Under de kommande åren, robotar som Nao kommer sannolikt att fungera i olika inställningar - sjukhus, hem och skolor - där de kommer att kunna ge en hjälpande hand och ett sympatiskt öra.
Roboten från "Lost in Space" (TV -serien från 1960 -talet, inte den hemska filmen från 1998) vandrade i min fantasi när jag skrev den här artikeln. Det var svårt att skriva om människor som interagerar med maskiner och inte höra Robotens ikoniska varning - "Fara, Will Robinson, fara! " - ekar i mina tankar.