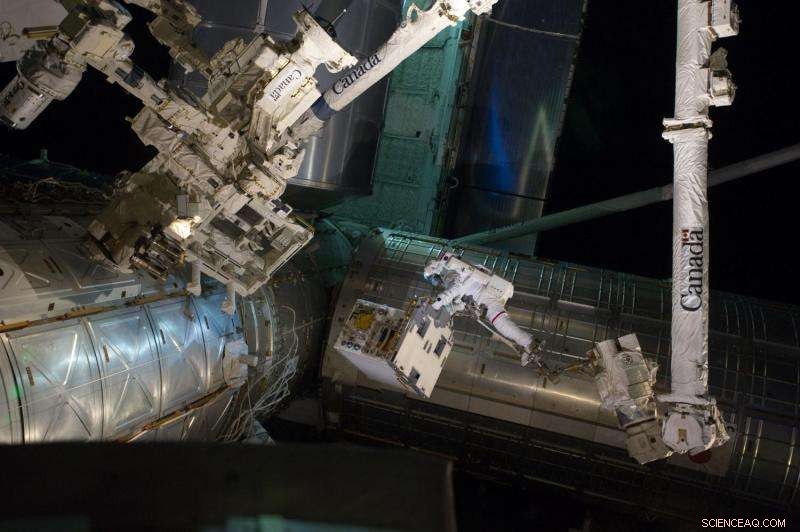
Astronaut Mike Fossums rymdpromenad för Robotics Refueling Mission nyttolast den 12 juli, 2011. Kredit:NASA
Den internationella rymdstationen fungerar som ett test- och demonstrationslaboratorium för kretslopp för vetenskapliga experiment som ska utföras i och utanför rymdstationen. Experimenten är inneboende övergående med typiska livscykler på cirka ett till fem år. När deras testmål har uppnåtts, de tas bort för att ge plats för nya experiment.
Den 19 februari kl. ett NASA-experiment-en testmodul som heter Raven-lanserades framgångsrikt på SpaceX-10/Dragon och installerades på utsidan av stationen, där den kommer att testa autopilotteknik för rymdfarkoster. När Korps nyttolast tog sin abborre på stationen, en annan skapelse av Satellite Servicing Projects Division (SSPD) - nyttolasten Robotic Refueling Mission (RRM), avgick. Ombord på Dragon -stammen där Raven kom, RRM tog sig tillbaka till jorden den 19 mars, där det kom in igen atmosfären. Även om båda nyttolasterna var och är avgörande för utvecklingen av satellitservice, efter att RRM tjänat sitt syfte och uppnått sina mål, det var dags för RRM att lämna stationen och ge plats för nya experiment.
RRM har etablerat ett fast arv när det gäller att demonstrera satellitservicefunktioner och att service i omloppsbana är tekniskt redo för implementering. RRM lanserades i juli 2011 ombord på den sista rymdfärjan och var den sista nyttolasten som togs bort från skyttel lastrummet av en astronaut. Den monterades därefter utanför på en Express Logistics Carrier byggd vid NASA:s Goddard Space Flight Center i Greenbelt, Maryland. RRM demonstrerade och testade verktygen, teknik och teknik som behövs för att robotiskt tanka och reparera satelliter i rymden som inte var avsedda att servas.
Robotic Refueling Mission var en väsentlig bro mellan bemannad service som utförs i Hubble Servicing Missions och robot service som kommer att demonstreras i det kommande Restore-L-uppdraget, "sa Ben Reed, biträdande avdelningsdirektör för SSPD. "Vårt team arbetade mycket hårt med att utveckla paketet med RRM-verktyg och experiment och är mycket nöjda med att se vad de åstadkommit. Vi är ivriga att tillämpa lärdomarna från RRM på Restore-L-uppdraget samt framtida serviceinsatser."
Året var 2010 då planeringen för RRM började. Det fjärde Hubble -rymdteleskopets servicemission hade precis avslutats. Rymdfärjan var i skymningen av sin karriär, planerad att gå i pension 2011. De hundratals ingenjörer på Goddard som hade stöttat service på Hubble var inte säkra på vad en framtid utan buss skulle innebära. Ett lag, ledd av "servicefadern" Frank Cepollina, började brainstorma hur man fortsätter serva utan buss. Utan tid att slösa, Cepollinas team bestämde att framtiden för service skulle förlita sig på robotik och rymdstationens robotarm var den bästa mekanismen för att testa och utveckla robotiska servicetekniker. Arton månader senare - extremt snabbt för ett projekt av denna komplexitet - var RRM i rymdfärjan Atlantis lastfack, redo att lansera och demonstrera för världen att robotisk service hade kommit i åldern.
"Rymdstationen är i omloppsbana och har redan en robot, "sa Frank Cepollina, den tidigare associerade direktören för SSPD. "Rymdstationen var skräddarsydd för RRM och fungerade vackert som en testbädd för service."
RRM-nyttolasten i tvättmaskinstorlek rymde fyra unika verktyg som användes av stationens dubbelarmade kanadensiska "Dextre" -robot för att åstadkomma den exakta, komplexa uppgifter som behövs för att tanka en satellit. Dessa uppgifter inkluderade att klippa och skala tillbaka värmefiltar, skruva loss flera lock, komma åt ventiler och överföra ett simulerat satellitbränsle. I januari 2013, med denna vätskeöverföring i rymden, RRM bekräftade att dagens robotteknik kan tanka en trippelförseglad satellitbränsleventil, överföring av 1,7 liter etanol.
I separata lanseringar 2013 och 2014, två nya uppgiftstavlor och ett verktyg skickades till rymdstationen som en del av RRM "Fas 2" Arbetsuppgifterna visade vidare aktiviteter som är viktiga för att betjäna frittflygande satelliter. Liknande, det nya verktyget, den visuella inspektionsposibla ryggradslösa roboten, eller VIPIR, uppvisade toppmoderna när- och mellanklassinspektion med hjälp av en ledbar, "ormliknande" boreskopverktyg.
Genom dessa två faser och flera dagars drift, RRM -teamet har bundit sig och konsekvent presterat under press. Tillsammans skapade de en nyttolast och genomförde ett uppdrag som var avgörande för satellitservicens framtid. För närvarande, de utvecklar och arbetar för att genomföra en tredje fas av RRM, som kommer att fortsätta att utveckla den teknik som är nödvändig för robotisk tankning. RRM 3 kommer att fokusera specifikt på service av kryogenvätska och xenongasgränssnitt som kommer att stödja framtida vetenskapliga uppdrag när människor förlänger sin utforskning längre in i vårt solsystem.
"Rymdstationen var en underbar anläggning för att testa vår teknik, och vi vet att RRM:s avgång kommer att ge plats för ännu ett bra experiment, "sa Jill McGuire, RRM projektledare. "Vi är stolta över vad vi åstadkommit med RRM, och är glada över att kunna bidra till nästa steg för att möjliggöra robotisk satellitservice. "