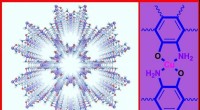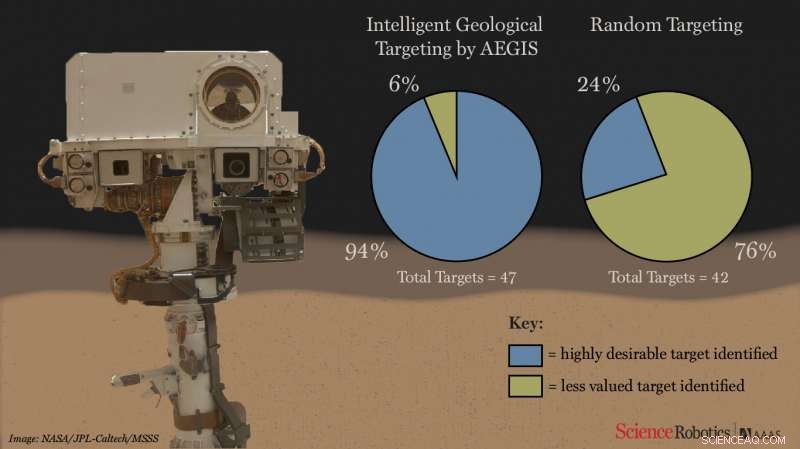
Tar bara 21, 000 av Curiosity -uppdragets sammanlagda 3,8 miljoner rader kod, AEGIS valde noggrant ut önskade mål över 2,5 kilometer outforskad Mars-terräng 93 % av tiden, jämfört med de 24 % som förväntas utan programvaran. I detta fall, det önskade målet var outcrop, en typ av marssten som är idealisk för att analysera den röda planetens geologiska historia. Kredit:Carla Schaffer / AAAS
(Phys.org) - Ett team av forskare från USA, Danmark och Frankrike har skapat en rapport om skapandet och användningen av programvara som är avsedd att ge utforskande robotar i rymden mer autonomi. I deras papper publicerad i tidskriften Vetenskapsrobotik , teamet beskriver programvaran, kallad Autonomous Exploration for Gathering Increased Science (AEGIS), och hur bra den presterade på Mars rover Curiosity.
På grund av deras begränsade datorkraft och avstånd från jorden, rymdforskare tror att det skulle vara fördelaktigt för utforskande robotar att ha möjlighet att välja vilka saker som ska studeras. Det skulle också möjliggöra mer forskning när en robot inte kan kommunicera med jorden, som när det är på den motsatta sidan av en planet. Utan ett sådant system, en robot skulle behöva skanna en region, fotografera det, skicka tillbaka de fotografiska bilderna till jorden och vänta sedan på instruktioner om vad du ska göra. Med ett sådant system, en robot som Curiosity kunde skanna horisonten, välj ett föremål att studera och kör sedan över och studera det. Detta tillvägagångssätt skulle spara mycket tid, låter roboten studera fler föremål innan dess användbara livslängd går ut. På grund av det, NASA gav ett team i uppdrag att skapa sådan programvara, som så småningom blev AEGIS. Programvaran testades och laddades sedan upp till Curiosity i maj 2016 och användes 54 gånger under de kommande 11 månaderna.
Programvaran låter rovern kontrollera vad som har kallats ChemCam, som är en anordning som används för att studera stenar eller andra geologiska egenskaper — en laser avfyras mot ett mål och sedan mäter sensorer de gaser som uppstår som ett resultat.
Forskarna rapporterar att de fann att systemet var 93 procent korrekt jämfört med 24 procent utan användning. Mjukvaran, de hävdar, sparade många timmars uppdragstid, som användes för att delta i andra användbara aktiviteter som att studera meteoritinnehåll. De rapporterar också att programvaran möjliggjorde en ökning av ChemCam-inriktningen från 256 per dag till 327, vilket innebar att mer data samlades in under lika lång tid.

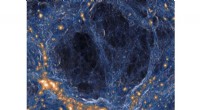
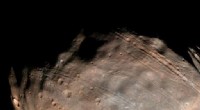
(A) ChemCam-blicken. (B) ChemCam skjuter lasrar mot stenar för att analysera deras innehåll, lämnar synliga märken både på ytan (överst till höger) och inuti borrhålet med en diameter på 16 mm (mitten) på denna "Windjana"-borrplats. (C) ChemCam-mätta markmål. (D) Remote Micro-Imager på ChemCam tar högfokuserade bilder av avlägsna mål, som detta område i Peace Vallis alluvialfläkt, ca 25 km bort. Kredit:Francis et al., Sci. Robot. 2, eaan4582 (2017)
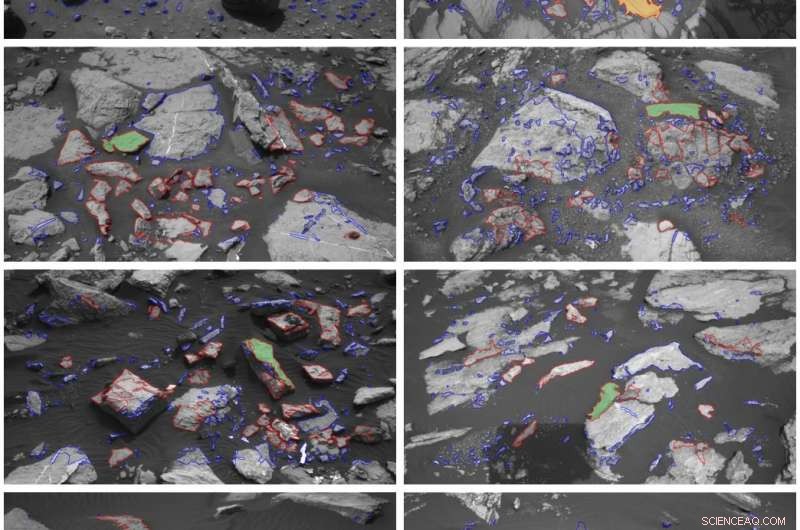
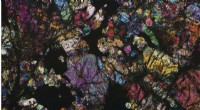
Exempel på AEGIS-målval, insamlade från Marsdagen 1400 till 1660. Mål som skisserades i blått förkastades; de som är markerade i rött behölls. Topprankade mål är gröna, och andra rankade mål är skuggade i orange. Kredit:Francis et al., Sci. Robot. 2, eaan4582 (2017)
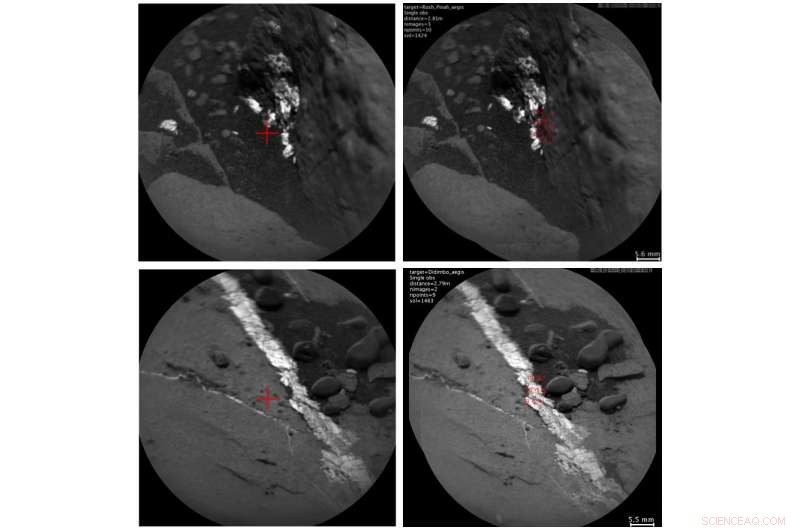
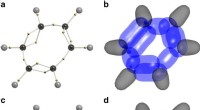
Exempel på AEGIS som fixar mänskliga kommandon som missar märket, kallad "autonom pekarförfining". (A, C) Människoberäknade mål i rött. (B, D) Målförfining av AEGIS indikerad i rött. Kredit:Francis et al., Sci. Robot. 2, eaan4582 (2017)
© 2017 Phys.org