Forskare utvecklar mjuka ställdon som ger robotar en mjuk touch. Kredit:Delfts tekniska universitet
Forskare vid TU Delft har utvecklat mycket programmerbara ställdon som, liknar den mänskliga handen, kombinera mjuka och hårda material för att utföra komplexa rörelser. Dessa material har stor potential för mjuka robotar som säkert och effektivt kan interagera med människor och andra ömtåliga föremål. Forskarna rapporterar om sitt arbete i Material horisonter i numret av den 8 juli.
Mjuk
"Robotar är vanligtvis stora och tunga. Men du vill också ha robotar som kan agera känsligt, till exempel vid hantering av mjukvävnad inuti människokroppen. Fältet som studerar denna fråga, mjuk robotik, börjar verkligen ta fart nu, " säger prof. Amir Zadpoor, som ledde den forskning som presenteras i Material horisonter .
"Vad du verkligen vill, är något som liknar den mänskliga handens egenskaper inklusive mjuk beröring, snabba men exakta rörelser, och makt. Och det är vad våra mjuka 3D-printade programmerbara material strävar efter att uppnå.
Stämbarhet
På grund av deras mjuka beröring, mjuk robotik kan på ett säkert och effektivt sätt interagera med människor och andra känsliga föremål. Mjuka programmerbara mekanismer krävs för att driva denna nya generation av robotar. Flexibla mekaniska metamaterial som arbetar på grundval av mekanisk instabilitet, erbjuder oöverträffade funktioner programmerade i deras arkitektonerade tyg som gör dem potentiellt mycket lovande som mjuka mekanismer. "Dock, avstämbarheten för de mekaniska metamaterial som hittills föreslagits har varit mycket begränsad, " säger forskaren och första författaren Shahram Janbaz.
Programmerbar
"Vi presenterar nu några nya konstruktioner av ultraprogrammerbara mekaniska metamaterial där inte bara aktiveringskraften och amplituden utan även aktiveringsläget kunde väljas och ställas in inom ett mycket brett område. Vi visar också några exempel på hur dessa mjuka manöverdon kan användas inom robotik, till exempel som en kraftbrytare, kinematiska kontroller, och en plocka-och-placera sluteffektor, säger Janbaz.
Spänning
"Funktionen är redan inkorporerad i materialet, " förklarar Zadpoor. "Därför, vi var tvungna att titta djupare på fenomenet buckling. Detta ansågs en gång vara symbolen för designfel, men har under de senaste åren använts för att utveckla mekaniska metamaterial med avancerade funktioner. Mjuk robotik i allmänhet och mjuka ställdon i synnerhet skulle kunna dra stor nytta av sådana designmaterial. Att frigöra den stora potentialen hos bucklingsdrivna material är, dock, beroende av att lösa den huvudsakliga begränsningen av de mönster som presenterats hittills, nämligen det begränsade utbudet av deras programmerbarhet. Vi kunde beräkna och förutsäga högre lägen för buckling och göra materialet predisponerat för dessa högre lägen."

En konventionell robotarm modifieras med de utvecklade mjuka ställdonen för att ge en mjuk beröring under plocka-och-place-uppgifter. Kredit:Delfts tekniska universitet
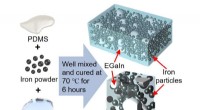
3d-utskrivning
"Så, vi presenterar multimaterial knäckningsdrivna metamaterial med höga nivåer av programmerbarhet, ", säger Janbaz. "Vi kombinerade rationella designmetoder baserade på prediktiva beräkningsmodeller med avancerad multi-material additiv tillverkningsteknik för att 3-D-printa cellulära material med godtyckliga distributioner av mjuka och hårda material i de centrala och hörndelarna av deras enhetsceller. Genom att använda geometrin och den rumsliga fördelningen av materialegenskaper som de huvudsakliga designparametrarna, vi utvecklade mjuka mekaniska metamaterial som beter sig som mekanismer vars aktiveringskraft och aktiveringsamplitud kan justeras."