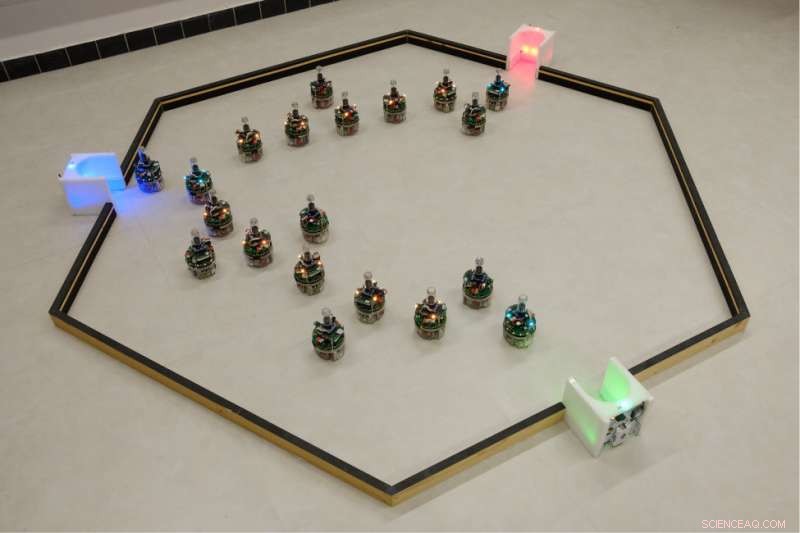
TS-Swarm i sin arena med tre bås. Upphovsman:Garattoni och Birattari, Sci. Robot. 3, eaat0430 (2018)
Kan robotar snart hjälpa räddningspersonal att rädda de överlevande efter en naturkatastrof? Ett sådant uppdrag skulle kräva att robotarna kunde bestämma, själva, vilka uppgifter som ska utföras och i vilken ordning de ska utföras; till exempel, det är ingen idé att försöka dra ett offer ur spillrorna om det fortfarande inte har rensats. För närvarande, ingenjörer är ansvariga för att programmera åtgärderna. Men detta kan snart förändras!
Mauro Birattari och Lorenzo Garattoni, forskare vid IRIDIA -laboratoriet (Brussels School of Engineering, Université Libre de Bruxelles), har nyligen visat att robotar kollektivt kan bestämma i vilken ordning de ska slutföra sina uppgifter. Resultaten av deras forskning publiceras i Science Robotics den här onsdagen, 18 juli.
Forskarna från IRIDIA -laboratoriet har baserat sin studie på svärmrobotik, en gren av robotik som drar från det sociala djurs kollektiva och organiserade beteende (t.ex. myror) för att skapa grupper av robotar som uppvisar artificiell intelligens. Robotar kan för närvarande kommunicera och samordna för att fatta beslut och utföra enkla uppgifter, som att flytta ett objekt eller välja en av två vägar. För deras senaste forskning, Mauro Birattari och Lorenzo Garattoni har tagit det ett steg längre när det gäller komplexitet:de har skapat en svärm av robotar som kan utföra en sekvens av tre åtgärder, utan att veta rätt ordning i förväg. I praktiken, robotarna var tvungna att flytta till tre olika punkter i rymden, där de skulle utföra en enkel uppgift. Först efter att uppgifterna var klara skulle robotarna lära sig om ordningen var korrekt. För att lösa detta problem, några av robotarna bildar gradvis en kedja mellan de tre punkterna i rymden, som de andra använder som vägledning när de testar de olika möjliga kombinationerna genom att följa instruktioner från robotarna som utgör kedjan (se foto). Så småningom, de bestämmer rätt sekvens genom att arbeta tillsammans.
Denna studie visar, för första gången, att robotar kollektivt kan bestämma en sekvens av åtgärder vars erforderliga ordning tidigare var okänd. Denna förmåga att planera framåt anses vara en komplex kognitiv skicklighet, och det framgår av interaktionerna mellan individerna i gruppen:tillsammans, robotarna kan planera en följd av åtgärder, som ingen individ i gruppen skulle kunna göra ensam.
Denna forskning banar väg för ett antal potentiella applikationer som involverar en grupp "smarta" robotar, dvs robotar som kan lösa problem på egen hand. Möjligheterna som forskarna förutser inkluderar att söka efter överlevande efter en naturkatastrof, utforska okända eller fientliga miljöer, bygga strukturer på farliga platser, och olika tillämpningar inom jordbruket. Förmågan - visad i denna studie - att autonomt bestämma i vilken ordning uppgifterna ska slutföras är avgörande för denna typ av uppdrag.
Mauro Birattari är pristagare av ett ERC Consolidator Grant. Denna forskning leddes för ERC -projektet "DEMIURGE:automatisk design av robotsvärmar."